Paso 5: código
Cualquier persona que intentó configurar manualmente valores de servo en MeArm pudo haber experimentado:
- servo motores/brazo moverse demasiado rápido
- difíciles de visualizar los valores de ángulo correcto para ubicaciones de destino pinza
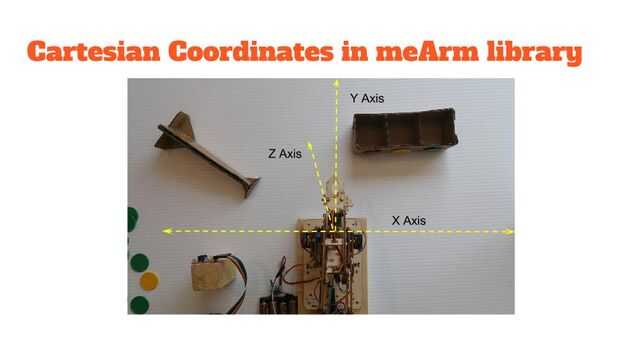
Pues bien, ambos problemas podrían remediarse por una librería llamada meArm (https://github.com/yorkhackspace/meArm). Sólo requiere la biblioteca x, y y coordenadas de z de la posición de destino y lo hace todo el trabajo de calcular los valores de ángulo correcto para servos. (Perfecto para estudiantes. Ellos entienden coordenadas cartesianas).
Debe descargar e instalar esta biblioteca meArm en su carpeta de la biblioteca Arduino primero.
Y luego, descargar el adjunto código IDE de Arduino. Comentarios en el código deben explicar lo que está sucediendo en el código. Fue escrito para Nano pero debería funcionar en otras placas Arduino con mods no o poco.











![CUBO del LED: Sin programación [cómo construir]](https://foto.askix.com/thumb/170x110/6/9b/69b175b0fd5b06c2ff81d2b6a6add35f.jpg "CUBO del LED: Sin programación [cómo construir]")

