Paso 1: sobre el diseño
En la fabricación de compañero de cama, básicamente convertí mi cama personal en un vehículo eléctrico uno mismo-conducción autónomo. No dejes que te engañe su muebles-ness. Hay un poco de UMF detrás de esto. La cama es capaz de conducir con un sostenido 8 caballos de fuerza y es capaz de un pico de hasta 25 caballos de fuerza por un tiempo limitado. La velocidad máxima actual es desconocida, pero es ciertamente más rápido que cualquier cama debe ir. También hay un montón de esfuerzo de torsión detrás de él. Se ha llevado hasta al menos 12 personas a la vez y no ha mostrado notables signos de desaceleración.
La cama fue diseñada para soportar hasta 3.000 libras vale la pena del peso y está construida alrededor de un marco de caja de torsión de madera. La columna de la unidad central es capaz de soportar las 3,000 libras todos en su propio derecho. Lo hice en el caso de la cama encontró una superficie altamente irregular y todos cuatro ruedas exteriores se encuentran de la tierra.
Las ruedas exteriores tienen resortes para absorber el choque y cuenta para superficies irregulares. Sin embargo, no hay ninguna suspensión real hablar de, por lo que no es exactamente un vehículo de carretera. Un bache puede ser potencialmente arrolladora. Esta cama fue diseñada principalmente para uso doméstico en interiores.
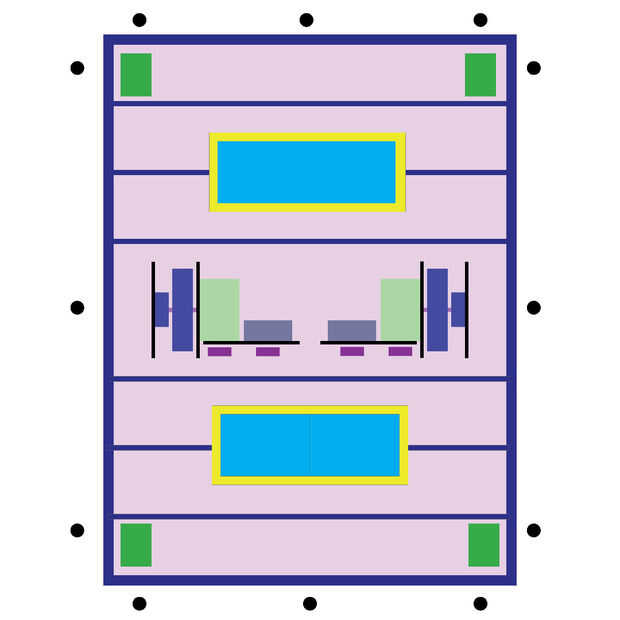
Las dos ruedas están ubicadas por debajo de la cama. Con este arreglo de la rueda, la cama es capaz de convertir en punto como un tanque girando las ruedas de enfrente uno del otro. Esto lo hace capaz de moverse bastante competente en espacios reducidos. Los motores están conectados a las ruedas a través de una reducción del engranaje de 1:20. Sin esto, todo se movía muy - muy - rápido. Este reductor es básicamente un mecanismo de accionamiento del gusano gigante que reduce el movimiento de la cama a las velocidades de la galería de ambiente.
Hay dos motores alta potencia está controlados por dos controladores de motor de Alltrax. Estos controladores se utilizan normalmente en golfcarts y otros vehículos eléctricos. Mi modelo concreto es capaz de manejar hasta 400 amperios. En el circuito de control del motor es un solenoide para que el poder y un contactor de inversión para invertir la dirección del motor. Cada motor tiene su propio Banco de batería y circuito de accionamiento independiente. Actualmente el sistema de tracción funciona a 24V, pero yo puedo ser impulsado a 48v para mayor velocidad. Sin embargo, cualquiera viajando más rápido de lo que es capaz en la actualidad probablemente no es una buena idea. También hay dos cargadores para cada banco de baterías a bordo.
Todo el sistema está siendo controlado por un Arduino Mega que es lectura 12 sensores de ultraonic e interfaces de los controladores de motor de Alltrax. La lógica es bastante sencilla. Básicamente está escogiendo una dirección al azar para moverse, a ver si hay algo cerca por en esa dirección, y luego si todo está claro - se mueve. Si hay algo en el camino, toma otra dirección al azar e intenta otra vez. Hay cuatro topes de seguridad que están conectados con el Arduino usando interrupciones. Si se golpean, la cama inmediatamente se detiene y reinicia su rutina.
Esto puede parecer simple y arbitrario, pero gente de interfaz con él como si tiene inteligencia y es útil considerarlos. Ya que este robot es bastante grande, gente abordarlo como un igual y crea una relación entre persona y máquina que ninguno de mis otros robots más pequeños han parecido realmente captar.
Como ya se mencionó, el sistema entero fue construido alrededor de mi bancada con personal y había incorporado mi actual colchón. El marco sí mismo era un marco de cuadro estándar de Ikea. Los aspectos de la cama que se mantuvieron no son especialmente estructural, sino más bien estético. Es un poco como derrumbar un edificio completo, pero manteniendo la fachada.







")





