Paso 41: Perno en los conjuntos impulsores


Rodillo de la plataforma de la caja de tosion a algún lugar fuera del camino.
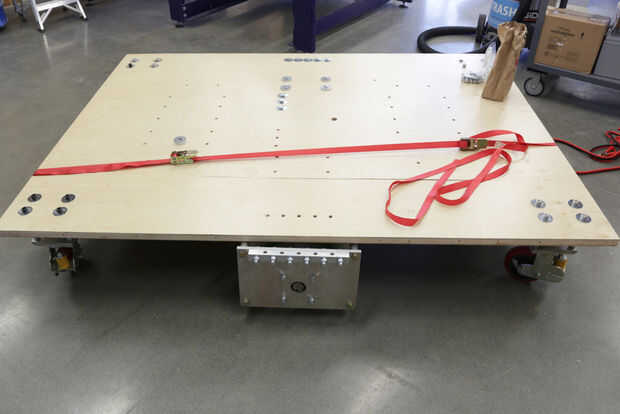
Coloque los conjuntos impulsores en el fram de torsión que el montaje de los agujeros desde el 1" cuadrado de valores soportes alinean con los agujeros correspondientes en la caja de torsión.
Las Asambleas será desproporcionadas para comenzar con y la torsión de elevación de la caja del suelo. Esto está bien.
Insertar 1/2-13 x 3 "pernos con arandelas de defensa hacia abajo a través del marco y en los orificios cuadrados stock lo mejor pueda. Esto es en gran parte para la alineación.
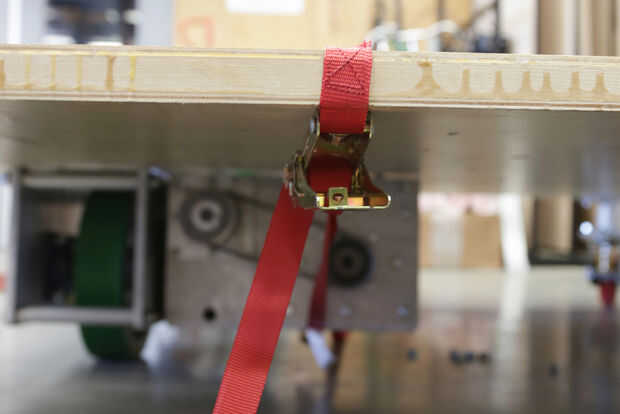
Una vez todo está más o menos en su lugar, utilice cintas de trinquete envueltos alrededor del marco para levantar del suelo las asambleas y hacerlas a ras con la caja de torsión. Siempre es conveniente poner un bloque de metal debajo de la esquina levantada para evitar que se le machaca en caso de que la correa se rompe.
Empuje los pernos ahora camino a través y fijarlas muy bien con tuercas de seguridad inserto de nylon. Si necesita golpear unos pernos a través de con un martillo, eso está bien. Martilleo es un aspecto importante de la robótica.
Una vez que estén atornilladas a la estructura, uso fender arandelas y 7/16-14 x 1-3/4" tornillos para sujetar la caja de engranajes en la parte superior de la caja de torsión.
Los conjuntos impulsores ahora deben estar firmemente asegurados en el lugar y la cama es ahora no va a ninguna parte (para un poco mientras que, por lo menos). Todo debe ahora pesan aproximadamente 300-400 poounds y puesto que la caja de cambios utiliza un montaje del engranaje de gusano, las ruedas no centrifugará a menos que el motor está acoplado. Por lo tanto, esta cosa no realmente está empujado o levantadas.







")





