Paso 16: Integración Final






La muñeca de esta mano está diseñada para ser compatible con el zócalo comercial de la muñeca.
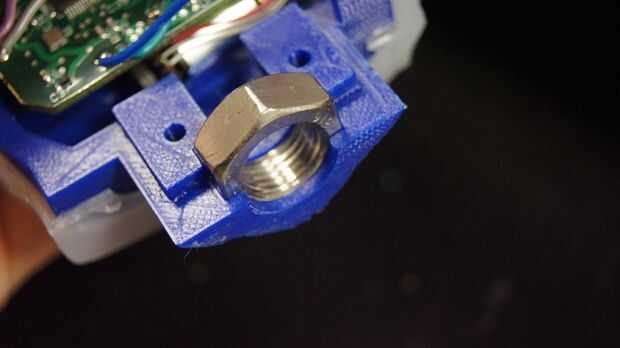
En orden a la Asamblea con el zócalo comercial, necesita 1/2 pulgada 20 perno con tuerca.
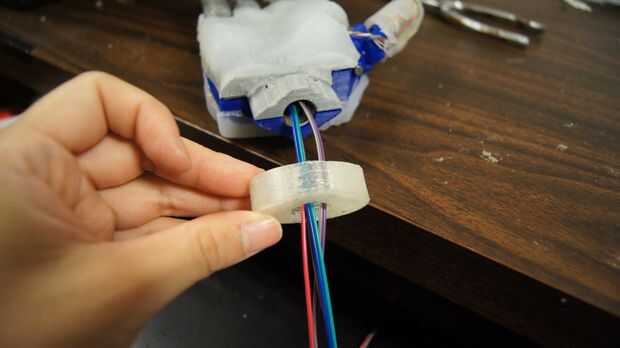
También para esta aplicación, el centro del perno debe taladrarse para tener cerca de 7 ~ 8mm de diámetro del agujero. Este agujero es para los cables (alimentación, I2C) de la Junta de la mano a la toma del antebrazo.
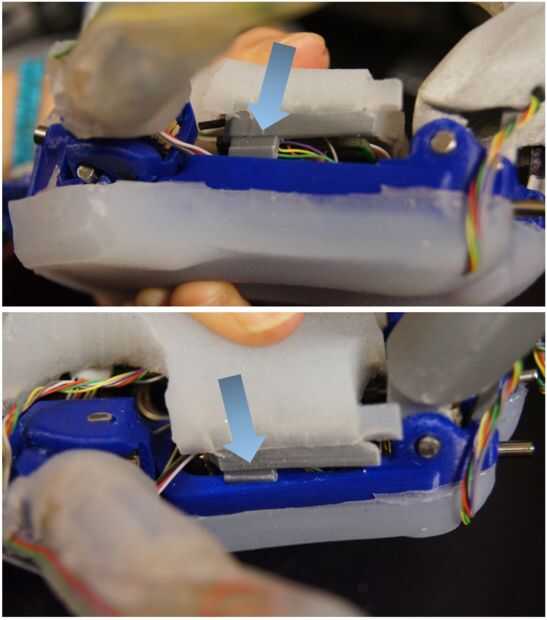
- Coloque la cabeza del perno en la palma. Que se ajusta con el espacio en forma de hexágono de la palma.
- Cubra la Palma la palma superior. Le encaje con parte de la palma
- Monte el soporte de muñeca impreso de SemiFlex en la palma montada. Le aprietan las dos Palmas
- Poner la parte de palm_wrist_socket_l e palm_wrist_socket_r en el soporte de muñeca
- Tornillo con dos tornillos M2.5 y sujeción con tuercas a través de los orificios de las tomas de la muñeca
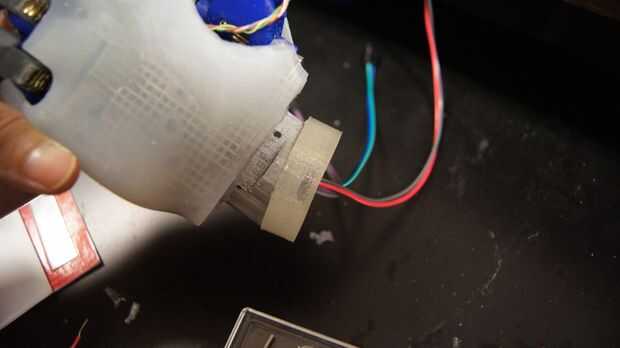
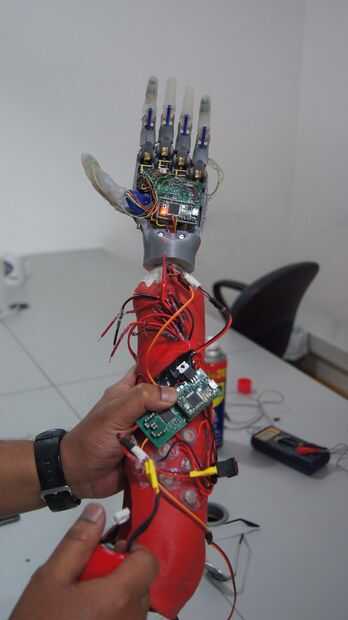
O, si quieres construir tu propia toma de brazo mediante escáner 3D como se muestra en las fotos (la toma del antebrazo rojo está impreso con filamento PET en Ultimaker 2 Extended) puede seguir de esta manera:
- Coloque la tuerca dentro de la palma en lugar del tornillo. También es apropiado el lugar en forma de hexágono con la tuerca
- Cerrar la Palma la palma superior y mantenerlos con soporte para muñeca
- Cubrir con las piezas palm_wrist_socket
- El perno debe colocado en la punta final de la pieza de toma del antebrazo y fijado con epoxi
- Después de que el epoxi es curado puede montar la mano en la toma del brazo de la mano de montaje en el tornillo de la toma de
- Para hacer esto como una muñeca de fricción, puede hacer alguna pieza de goma pasan por el perno. Mantendrá la mano gire más y fijo en la dirección deseada













