Paso 8: Parte blanda: colada de silicona-dedos
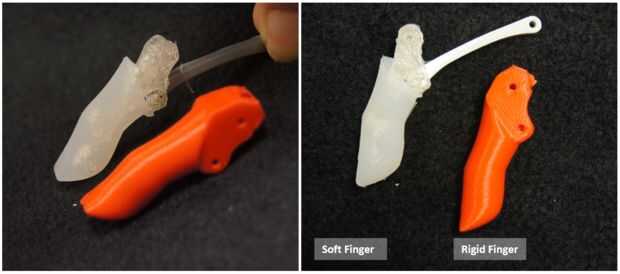




A diferencia con el dedo rígido el dedo distal blando de silicona permiten la mano ajustar su alcance formas diferentemente dependen en el objeto. El dedo distal con silicona tiene un cumplimiento en el baño común (la Unión del extremo de los dedos) y como puede ver en el video en el paso anterior, es muy flexible y suave!
- Silicona: DragonSkin-20 (Tiempo de curación: 4 hrs)
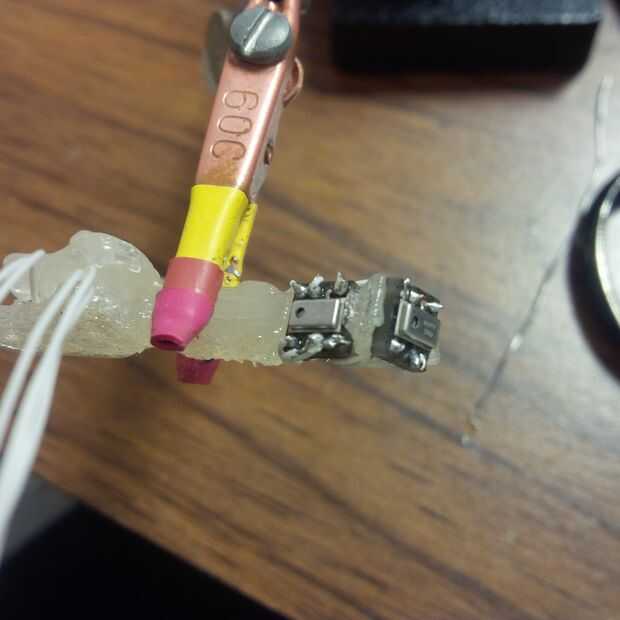
Dos sensores de presión están integrados en cada índice, medio y dedo pulgar, que alineados entre sí perpendicularmente. Uno en la punta de los dedos es para detectar la fuerza normal de la yema del dedo, y el otro sensor en la parte inferior del dedo es para detectar la fuerza de contacto cuando el dedo agarra algún objeto.
Este paso muestra el proceso de silicona del bastidor para los dedos excepto el pulgar (aparecerá en el siguiente paso)
Todas las piezas necesarias para el bastidor de la silicona pueden descargarse también en Thingiverse
Si desea saltar esta parte, también os adjunto la versión rígida del dedo distal STL archivo ('rigid_distal_finger. STL')
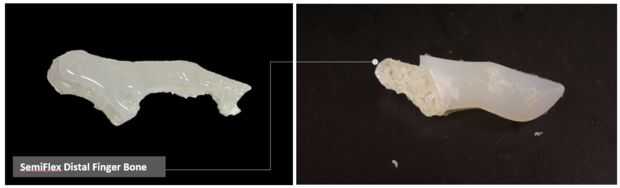
- Antes de colocar el hueso del dedo distal SemiFlex en el molde, debe fijar dos sensores de presión como se muestra en las fotos y hacer que fija firmemente. Pegamento caliente es útil!
- Con la mezcla preparada de DragonSkin-20, primero debe cubrir los agujeros de los sensores de presión de dos.
- Puede ver un pequeño agujero en la superficie del sensor de presión. Este agujero deberá rellenarse con silicona sin burbuja de aire con el fin de obtener datos limpios y precisos. Dentro del diminuto agujero, hay un sensor de MEMS y el proceso de desgasificación ayuda el aire atrapado en el agujero para volver a salir. (Puede ver principio detallada en este enlace)
- Así! Para llenar el agujero pequeño, preparar el pequeño diámetro del alambre o sharp aguja.
- Remoje la aguja en la mezcla de silicona y tire hacia afuera. Usted será capaz de hacer un hilo de silicona muy pequeño que se pega en la punta de la aguja.
- Con el hilo de silicona, tratar de llenar el agujero del sensor con el hilo y cubrir toda la superficie de sensores de presión.
- Poner el hueso de dedo distal SemiFlex con dos sensores de presión y la taza con la mezcla de silicona en cámara de vacío
- Pasar por el mismo proceso como se muestra en el paso anterior
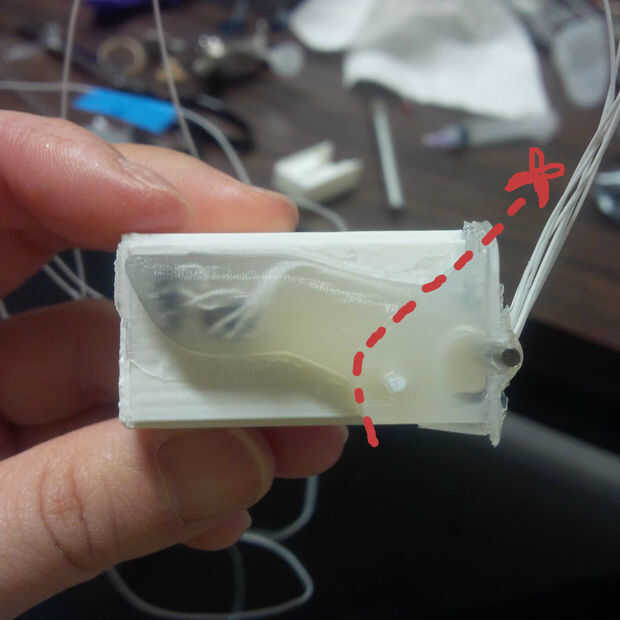
- Sacar el hueso y la Copa. Poner el hueso en el molde. Puede corregir en el molde con los ejes de diámetro de 2mm como se muestra en las fotos anteriores.
- Verter la silicona en el molde lentamente. No verter la mayor cantidad de silicona a la vez hacer
- Espere 4 horas ser curada.
- Abre el molde y sacar el dedo de silicona!
- Limpiar el dedo de silicona y recortar la parte innecesaria, como se muestra en la foto de arriba













