Paso 9: Establecer comunicaciones de dos vías
El K64F es hablar con la PC. Ahora queremos hablar con el K64F. He escrito un programa para controlar los LEDs tri-color de la terminal.
Reemplace el main.cpp con el archivo adjunto.
Volver al puerto de desarrollo
Compile y guarde el archivo en mbed para.
Cambiar a otro puerto.
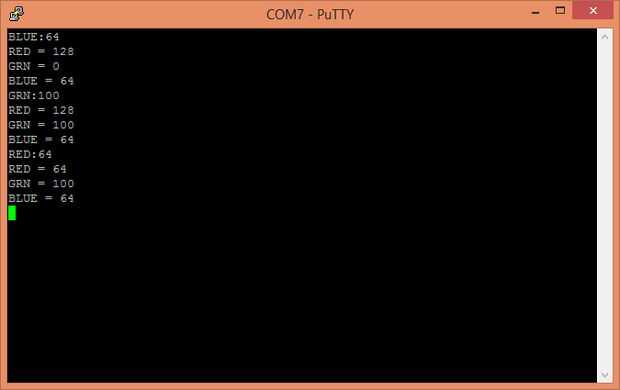
Los comandos son de la forma: valor de COLOR donde el COLOR es rojo, GRN o azul el valor es 0-255.
El carácter separador es dos puntos (:).
Ahora tenemos un canal de comunicación USB para controlar nuestro robot. Tenga en cuenta que este paquete incluye varios otros paquetes USB. El paquete USBHID es probable que utilizaríamos si hemos de escribir nuestro propio controlador de PC.













")