Paso 5: Controlar el rodillo
Teoría de control es una tortura tediosa y largo y frontera; sin embargo, es muy satisfactorio una vez que usted escriba e implementar un controlador de trabajo.
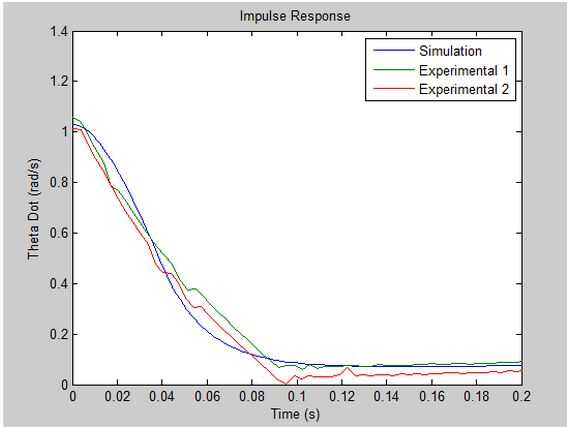
A este paso es que una imagen de la respuesta del impulso simulado versos el impulso real obtenida.
Este instructable voluntad ligeramente ir sobre algunos de los parámetros de los controles y los resultados de este proyecto específico. Si quieres más en profundidad los controles tutorial hay algunos tutoriales increíbles por ahí.
Al diseñar un controlador para este sistema, hay varios factores inmediatos que deben tenerse en cuenta.
Primera, esto es un sistema digital y no debe ser modelada como continua.
Segundo, el tiempo del PWM servomotor es 200ms (5 Hz). Porque se utilizan solenoides de grado de consumidor (sobre solenoides de grado aeroespacial personalizado) una compensación fue hecha entre el tiempo de respuesta del actuador y el coeficiente de tasa de flujo de solenoide; nos asentamos con un desfase abierto de 20ms en el solenoide.
Tercero, hay una cantidad limitada de nitrógeno para el segundo vuelo de 20(+). En última instancia será un regulador cuadrático lineal usada peso al costo del uso de combustible.
Cuarto, los solenoides son ON / OFF y no varían como solenoides proporcionales. Para obtener un gradiente en empuje, el software de control cambió el ciclo de trabajo para que coincida con el impulso necesario por la tarifa de la rotación.
El algoritmo de control digital utilizado fue sólo con un controlador proporcional; sin embargo, era tamaño usando bode análisis para tener 60 grados de margen de fase y - 6 dB de margen de ganancia. Estos márgenes de bode permitir la funcionalidad del sistema con hasta una 50% la variabilidad en parámetros medioambientales (p. ej. peso cambia, desnivel, velocidad del viento, arrastre inesperado).








")

")


")