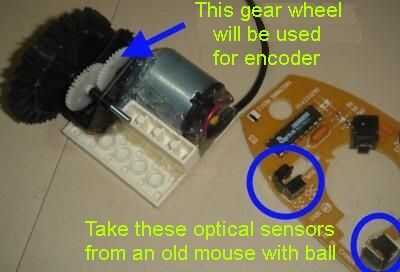
Generalmente las ruedas del robot giran por un motor a través de algunos cambios - un conjunto de engranajes ruedas baja velocidad de rotación del motor en muchas veces. La rueda del engranaje girar rueda del robot tiene ya varias veces de rotación más velocidad de la rueda. La próxima rueda del engranaje girar esta rueda de engranaje tiene más velocidad y así sucesivamente. Si los agujeros de taladro en uno de estos engranajes de ruedas y situar los sensores ópticos se - es posible registrar cambios de ángulo de rotación con precisión fina.
LED y receptor óptico se toman de un ratón viejo con una pelota dentro en vez de sensor óptico. Receptor óptico realmente es un transistor de la foto o un fotodiodo que tiene resistencia sobre cientos ohmios y menos sensible cuando el LED se enciende en él.




")

")





 una rueda de alambre Simple")
