Paso 2: Estructura del código
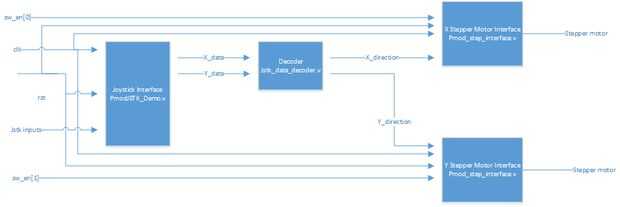
Para conectar las dos piezas de código había añadido un decodificador y utiliza una interfaz de PmodJSTK y dos motores de PmodSTEP. Puedes ver esta estructura en el diagrama anterior. He modificado la interfaz de PmodJSTK para que sólo recibe datos desde el joystick y no enviar los datos a los leds.
El decodificador toma los datos de la palanca de mando y la convierte en una señal de dirección que indica si los motores paso a paso deben ir a la izquierda, derecha, o aún. Los motores paso a paso no deberían moverse cuando la palanca de mando está en el centro.










![Controlar motores de paso a paso Bipolar con Arduino [sin biblioteca]](https://foto.askix.com/thumb/170x110/5/87/587864a8efe29028e8562de52b3ccc03.jpg "Controlar motores de paso a paso Bipolar con Arduino [sin biblioteca]")


