Paso 6: finalmente! Control del motor!
Utilizando digitalWrite(), podemos cambiar los transistores de encendido y apagado girando el correspondiente pin alto o bajo.
Esto sólo cambiará el motor encendido y apagado en una dirección. Necesitamos un puente H para tener el control completo de un motor.
No se utilizar un puente H en este Insctructable.
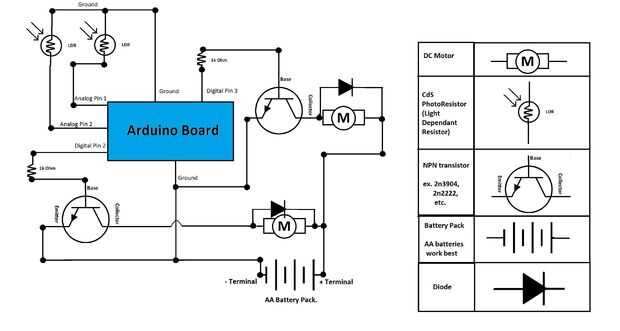
Conecte un extremo de un resistor del ohmio 1 k al pin 2 (motor derecho). Conecte el otro extremo a una fila vacía sobre la placa. Para agregar el transistor, alinee el terminal bajo del transistor con el fin de la resistencia e inserte en la misma fila de la resistencia. Conectar el colector a un perno del motor derecho. Conecte el emisor (restantes pin) a tierra. Conecte el otro pin del motor al terminal positivo de la batería. Repita para el motor izquierdo en el pin 3. También, conecte el terminal negativo de la batería con el conector de tierra en el Arduino.
Aquí están las funciones para obtener tu robot en movimiento.
Recto:
digitalWrite (RightMotor, alto);
digitalWrite (LeftMotor, alto);
Izquierda:
digitalWrite (RightMotor, alto);
digitalWrite (LeftMotor, bajo);
A la derecha:
digitalWrite (RightMotor, bajo);
digitalWrite (LeftMotor, alto);
Aviso a los dar vuelta, debes activar motor en lo contrario.



 con Video Stream en vivo!!")





 también controlado por voz")


