Paso 1: Diseñar los pista/peldaños
* ACTUALIZACIÓN *
Ya que muchos no notó la sección escribí sobre prevención de la deriva hacia los lados de la pista/pista deslizarse apagado. Me gustaría destacar su paso en 5. También he añadido representaciones con rodillo ruedas y "suspensión" ya que sé su TLDR (demasiado di no leer)
La principal diferencia sobre los sistemas tradicionales de la pista es que tenemos que ser capaces de girar una sección de la pista en una dimensión adicional que le permita hacer. Cada enlace debe tener 2 grados de libertad en términos de rotación.
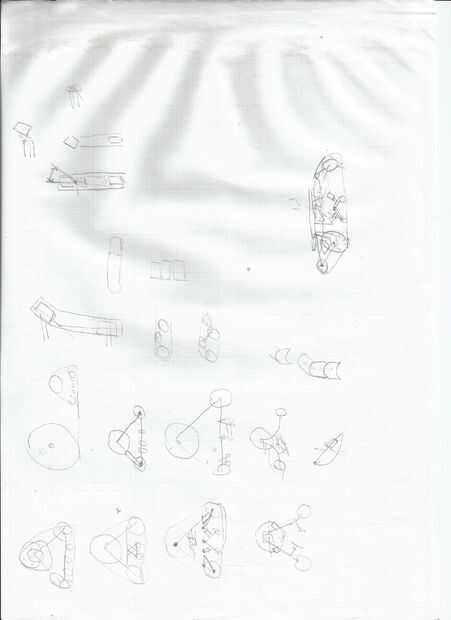
Comencé con un dibujo sobre cómo me gustaría trabajar. Cada enlace se hará de 2 partes donde en un extremo que permite rotación en un eje y en la rotación de otra final en un eje perpendicular.
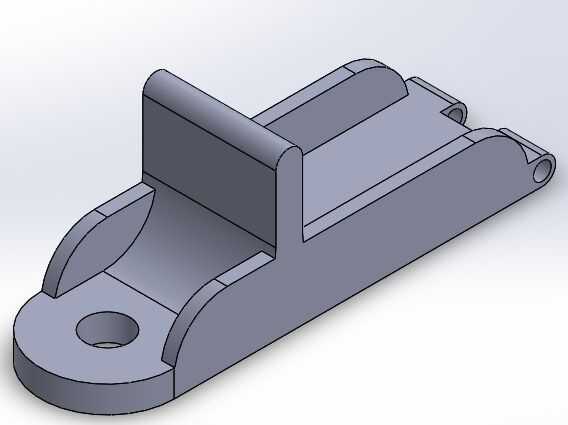
Nombre a la parte que tenga contacto con el suelo como "Plato principal" y la parte que permite la flexibilidad adicional que se denomina "Placa de pivote"
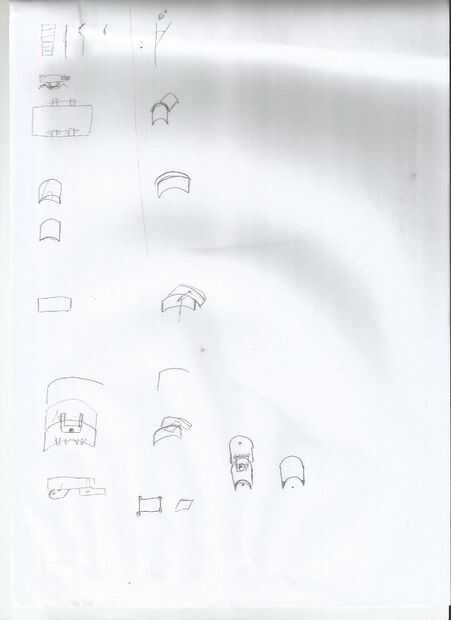
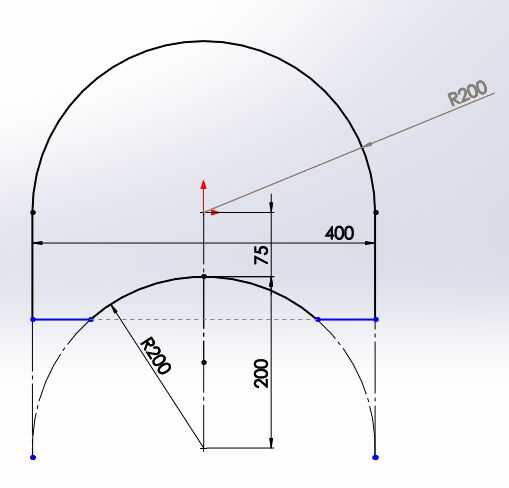
El plato principal deberá ser capaz de girar alrededor de las placas principales adyacentes mientras que maximiza el contacto con el suelo. Para lograr esto, utiliza un semicírculo para el frente. Para asegurar que el plato principal adyacente, gira el pivote debe estar ubicado en el centro del círculo. En la parte de atrás, hice un "picado" semicírculo, para picar fuera de la cola permite que gire correctamente (ver imagen).
En cuanto a la placa de pivote, ya que es más cercano a las "ruedas" que es la placa principal, también es trabajo de la placa de pivote para permitir un interfaz que permite poder ser transmitida a las pistas. La placa de pivote también va a tener cierta superficie de interconexión con los rodillos de guía que cubriremos más adelante. La placa de pivote es básicamente tiene un final que permite un plato principal girar sobre un eje y otro extremo que permite la placa principal siguiente girar sobre un eje perpendicular. También tiene una protuberancia grande que permite que el engranaje del accionamiento engranarlo y convertir la pista, como engranajes de estante y del piñón.
También hice un pin para mantener unida. Pero en retrospectiva, probablemente nos podemos omitir este pin para permitir la computación más rápida en el análisis de movimiento (se cubrirá más adelante) ya que los compañeros definidos será suficientes




")







 para la apnea del sueño")
