Paso 5: Parte inferior del chasis inferior.





Primero adquirió dos servos Futaba S3004 de mi caja de chatarra de R/C y había modificado para rotación continua (un montón de Instructables en esto). Las ruedas se montan en la forma típica, girando los brazos de servo para los cubos de rueda. Aviso también de montar las ruedas ligeramente detrás como apposed al frente. Esto es para darme mejor equilibrio y no mucho la presión sobre la rueda trasera o no lo suficiente y nariz sobre cuando parar.
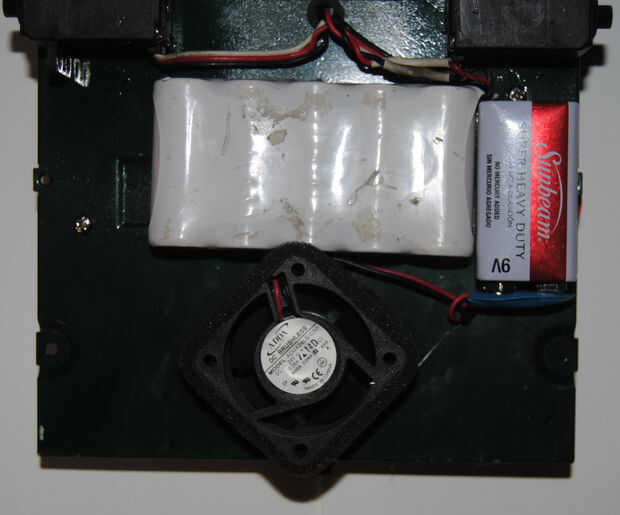
Entonces pegué un seis voltios, 2000 Mah. batería (RC otra reliquia) en la parte inferior. Esta batería se usa para conducir los motores servo.
Luego me puse el teclado. Fue dejado sobre algunas cajas de cerradura que hice. Tiene forro adhesivo del uno mismo que hace la instalación fácil y limpia.
Robots de dos ruedas la mayoría utilizan una rueda giratoria para la rueda trasera pero no tengo ninguna que pude encontrar aunque todo más baja una pieza de equipaje de una de las ruedas. Cómo siempre halló un conjunto de rueda de cola de RC, pero no pudo encontrar una manera para que Monte y ser robustos. Entonces vi un ventilador de la impresora y su orificio era del tamaño exacto del eje de rueda de cola y un buje perfecto. Así que aunque no era plan de Pee-Wee tiene un ventilador de refrigeración. El ventilador tiene una potencia de 24 voltios pero no lo suficientemente bien en 6 voltios.
Por último me caliente había pegado a la batería de nueve voltios para el Arduino en el lugar y entonces enruta los cables con toques de pegamento caliente y a través de los ojales.










 Contador prueba equipo pararrayos usando Arduino")


