Paso 4: Configuración de la conexión entre saltamontes y manejando el robot Roomba
Para hacer este paso es necesario descargar la definición de Grasshopper y el archivo de Python.
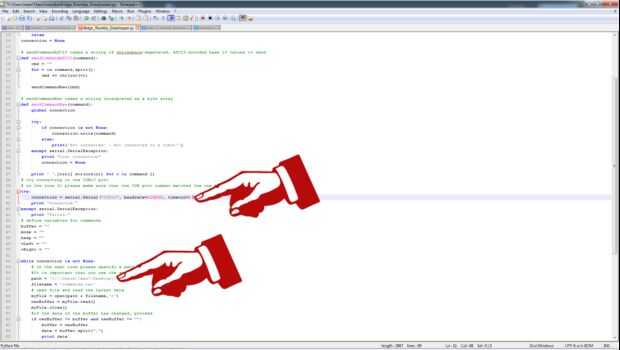
1 - abre el archivo Bridge_Roomba_Grasshopper.py para la edición (click derecho sobre el archivo y haga clic en "editar con bloc de notas")
2 - antes de ejecutar el archivo necesita cambiar algunas cosas.
-línea 41 comprobar que el número del puerto COM coincida con el puerto COM tu Roomba conectada a.
-línea 55 sustituir 'C:\\Users\\maw\\Desktop\\' con un directorio en su computadora. Puede ser cualquier carpeta.
3 - guardar los cambios en el archivo, cierre el Bloc de notas y ejecutar el archivo (doble click).
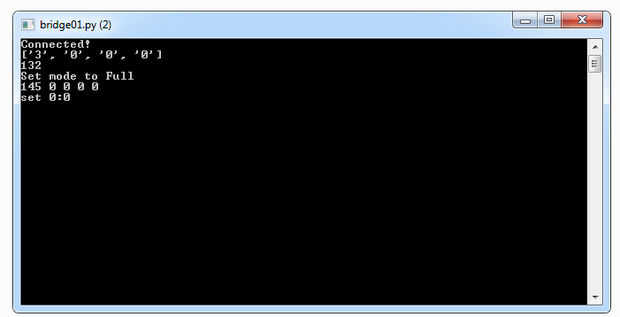
Si todo está conectado correctamente, debería ver una ventana negra diciendo "¡ conectado!", también muestra el último mensaje recibido (si hubo alguno) y un modo actual.
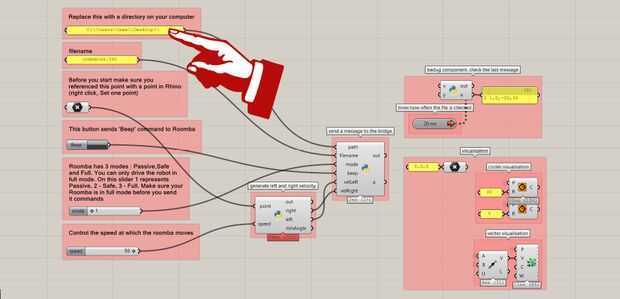
4 - ahora puede abrir el archivo de saltamontes RoombaDriveWithAVector.gh. Aquí también tenemos que hacer algunos cambios:
-cambiar la ruta a un directorio en su computadora. Rutas en archivo de GH y en el archivo PY que coincida con.
6 - Ponga la Roomba a una. Roomba tiene 3 modos: pasivo, completo, seguro. Sólo podemos controlar al robot cuando está en modo completo. Para ello, cambiar el deslizador de "modo" en la posición 3. A veces tienes que cambiar de posición de 1 a 3 unas cuantas veces para asegurarse de que el robot está en el modo correcto.
7 - para comprobar si el robot está conectado, puede haga clic en el botón de sonido. El robot se supone que hace un sonido al hacer clic en.
8 - ahora que todo está configurado, usted puede conducir finalmente el robot! Referencia el punto saltamontes hasta un punto en Rhino (click derecho, establecer un punto) ahora por arrastre este punto alrededor de la ventana de Rhino puede controlar tu Roomba! (ver video)






 también controlado por voz")
")

")



