Paso 5: Conducir un robot por lo que le da un punto de destino
Ahora que podemos manejar el robot de saltamontes, permite hacer un poco más complejo.
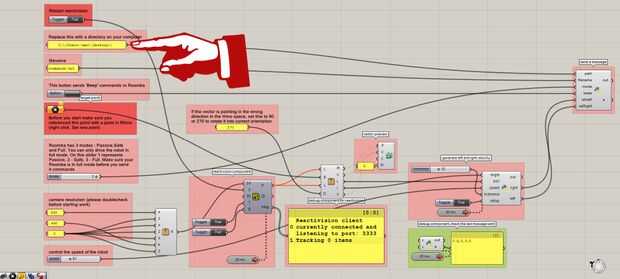
Para este paso descargar un nuevo archivo de GH 'DrivingRoombaWithaTargetPoint.gh'
1 - configurar tu cámara encima de su espacio de trabajo de manera que se puede ver como gran parte del espacio donde conduces tu robot como sea posible.
3 - ejecutar el software Reactivision (reactivision.exe). Tienen que para ver la cámara desde su webcam en el reactivision. Los marcadores fiduciales en la alimentación se suponen para ser representados con números y marcas verdes. Asegúrese de que la iluminación de la habitación es adecuada y los marcadores son lo suficientemente grandes para el software a reconocerlos. A veces ayuda a imprimir marcadores de 2 - 3 veces su tamaño original. Parece gracioso, pero que le permite aumentar su espacio de la cámara activa.
4 - abrir el archivo 'DrivingRoombaWithaTargetPoint.gh' de GH
5 - igual que en el paso anterior, cambie la ruta
6 - referencia el punto saltamontes hasta un punto en Rhino (click derecho, un punto)
7 - Ponga la Roomba a una. Roomba tiene 3 modos: pasivo, completo, seguro. Sólo podemos controlar al robot cuando está en modo completo. Para ello, cambiar el deslizador de "modo" en la posición 3. A veces tienes que cambiar de posición de 1 a 3 unas cuantas veces para asegurarse de que el robot está en el modo correcto.
8 - para comprobar si el robot está conectado, puede haga clic en el botón de sonido. El robot se supone que hace un sonido al hacer clic en.
9 - ahora arrastrar este punto alrededor de la ventana de Rhino puede controlar posición de Roomba en la alimentación de la cámara. (ver video)






 también controlado por voz")
")

")



