Paso 3: Conectar la PCB a la placa de rampas.
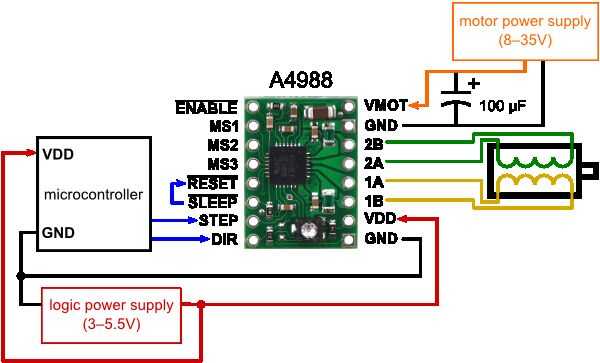
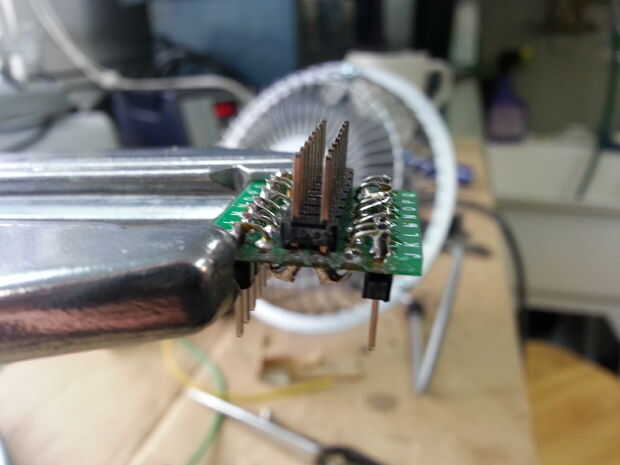
La versión 1.4 rampas tiene 5 portadores del controlador paso a paso de Allegro chip A4988. Cada uno de estos controladores utiliza 16 pernos pero el THB6064AH sólo tiene 4 pines: paso, Dir, VDD y GND. Hice un pequeño PCB que se encuentra donde una A4988 normalmente pero sólo hace las clavijas accesible que podría fácilmente y con seguridad correr un cable a la Junta de THB6064AH.
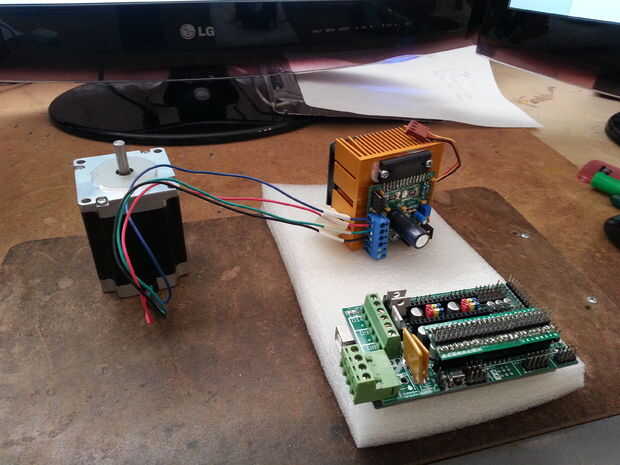
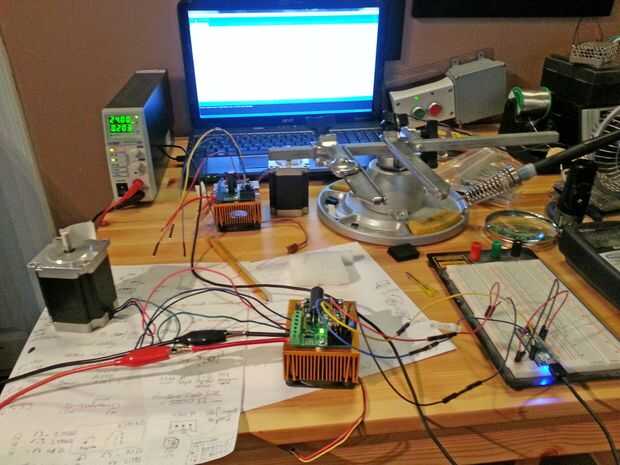
El conductor también puede conectarse directamente a un arduino. Si desea ejecutar esta forma aquí es un bosquejo de la prueba simple para el arduino.
/*
Fecha: 16 de noviembre de 2015 construir: 0.0.1c
Título: Stepper_Test_02
*/
Declaraciones de variables int stepPin8 = 8;
int dirPin9 = 9; minDelay int = 100;
maxDelay int = 2000;
rotación booleano = bajo; bajo = cw, alto = ccw
void setup() {}
inicializar los polos a la entrada y salida
pinMode (stepPin8, salida);
pinMode (dirPin9, salida);
digitalWrite (stepPin8, bajo);
digitalWrite (dirPin9, bajo);
}
void loop() {}
para (int speedUpDelay = maxDelay; speedUpDelay > minDelay; speedUpDelay--)
reducir el retraso para aumentar la velocidad de rotación
{digitalWrite (stepPin8, HIGH);
delayMicroseconds (speedUpDelay);
digitalWrite (stepPin8, bajo);
delayMicroseconds (speedUpDelay); }
para (int fullRotation = 25600; fullRotation > 0; fullRotation--) / / modo de escalonamiento 25600 = 1/16
{digitalWrite (stepPin8, HIGH);
delayMicroseconds (minDelay);
digitalWrite (stepPin8, bajo);
delayMicroseconds (minDelay); }
para (int slowDownDelay = minDelay; slowDownDelay < maxDelay; slowDownDelay ++) / / aumentar la demora para disminuir la tasa de rotación
{digitalWrite (stepPin8, HIGH);
delayMicroseconds (slowDownDelay);
digitalWrite (stepPin8, bajo);
delayMicroseconds (slowDownDelay); }
rotación =! rotación;
digitalWrite (dirPin9, rotación);
}


")








![Escudo del Motor Arduino DIY [por sólo $8!] (L298N 2x4A)](https://foto.askix.com/thumb/170x110/9/44/944b4e3d55d5395583213b4d0d36ee0e.jpg "Escudo del Motor Arduino DIY [por sólo $8!] (L298N 2x4A)")

