Paso 1: Un conductor Universal
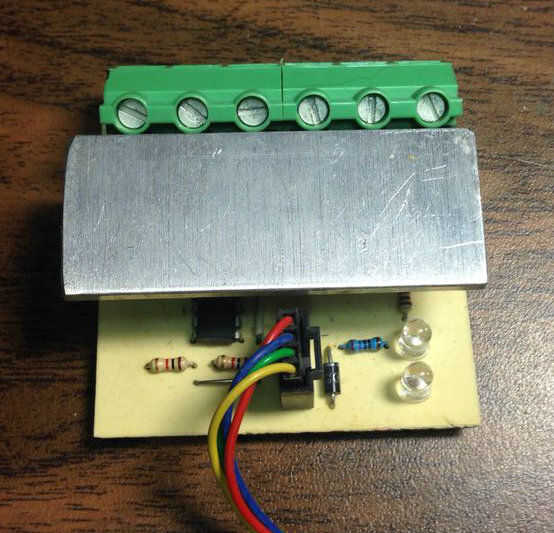
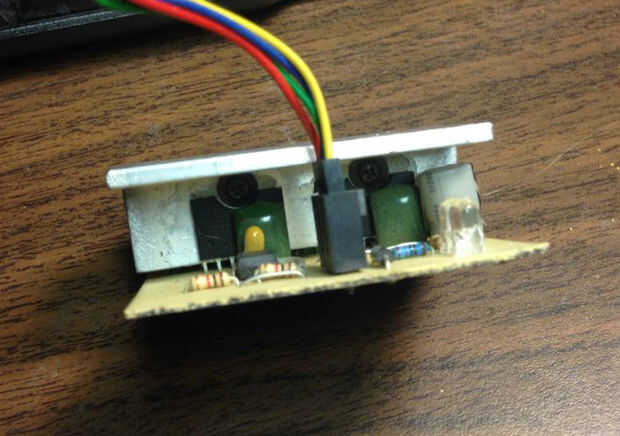
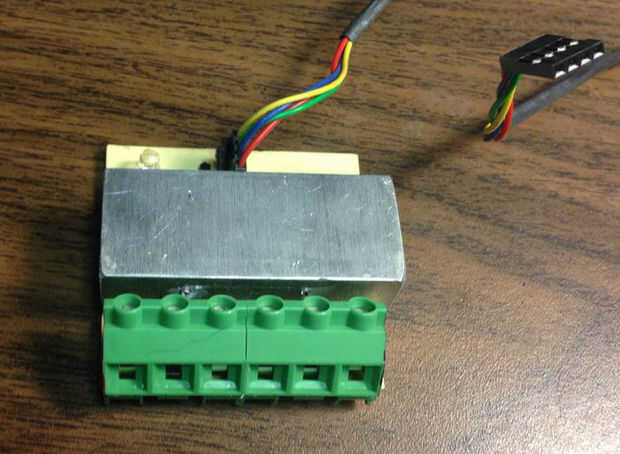
Construí un montón de estos para utilizar con Linux de EMC. Utilicé este mismo circuito para todo tipo de dirvers motor paso a paso en CNC, movimientos de medidor digital de eggbot, probadores de Control de aire de ralentí (IAC), etc. las fichas de TA8050P son capaces de manejar 30V a 1,5 amperios por fase con de sobrecorriente, sobretensión y protección térmica. También se utiliza las virutas de TA8080K más baratas que son 30V a 1a.
Hay diferentes versiones del código del pic para los modos full y medio paso. Usando una viruta más grande de la cuenta de perno sería posible añadir una patillas seleccionar para el modo de paso e incluso un enable. Nunca realmente que necesitaba desde que construir cada tablero o un equipo concreto y saber si se necesita la mitad o completo modo de paso.
la falta de permitir nunca me ha molestado. Usé la señal habilitadora de la computadora para controlar el suministro de motor. El PIC se ejecuta desde una fuente de 5v independiente por lo que mantienen su lógica activa.
También he colocado una lámpara de auto en serie con el cable de motor y utiliza la línea de activar para derivación con un relé. Esto mantiene una baja corriente a través de los motores cuando no están activados y actúa como un freno.
Quiero tratar de utilizar una fuente programable y usar el pin enable para elevar la tensión de alimentación motor proporciona el mismo efecto sin la lámpara incandescente. parece muy complicado cuando tengo muchos bulbos 1156 en el estante...
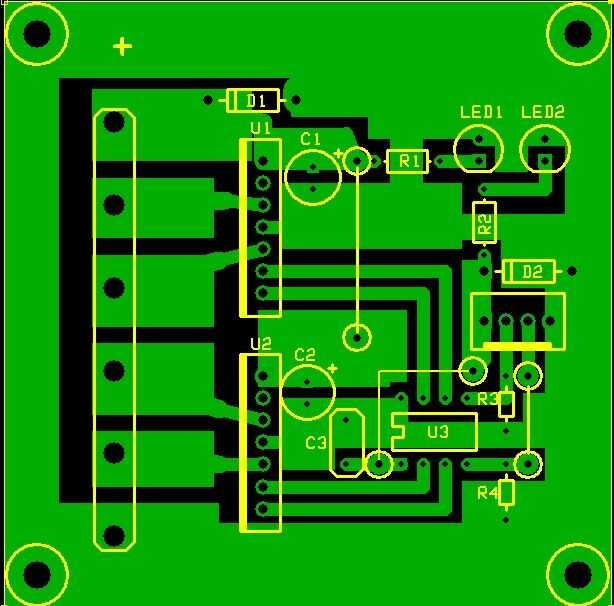
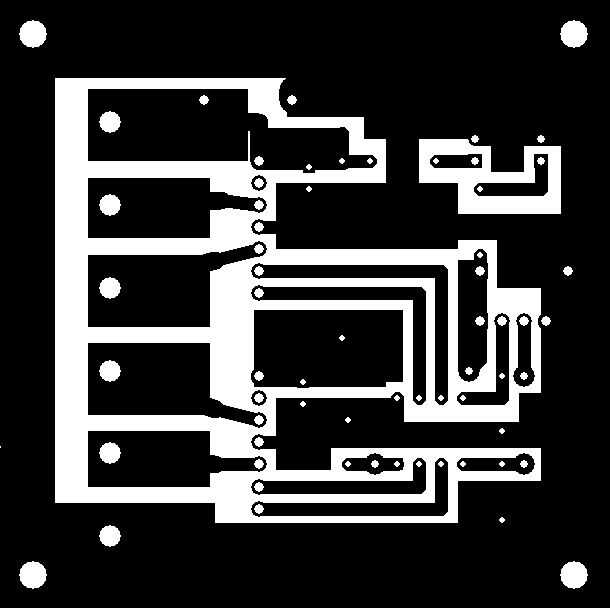
BOM:
U1 - TA8050P
U2 - TA8050P
U3 - 12 508/9
R1 - 1K
R2 - 1K
R3 - 10K
R4 - 10K
C1 - 25uF 35V
C2 - 25uF 35V
C3 - 10uf 10V
D1 - 1N4007
D2 - 1N4007







")





