Paso 1: Conectar el hardware

Conectar el controlador de Motor L293D
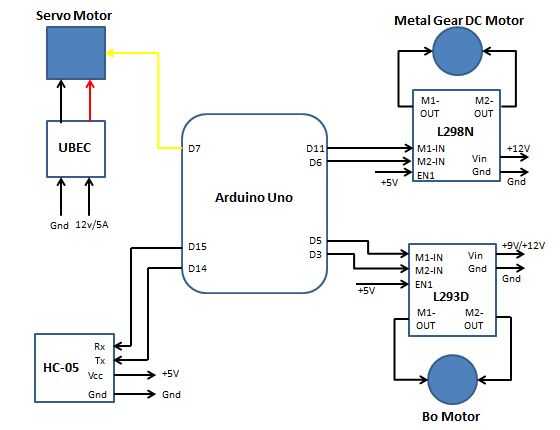
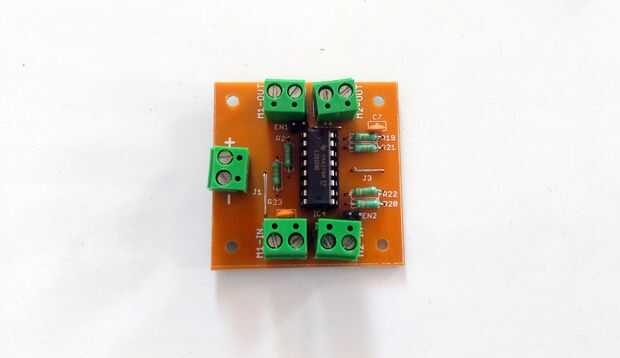
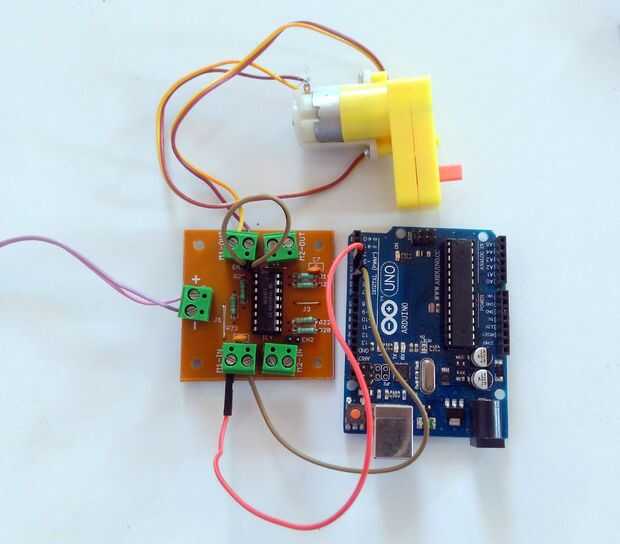
L293D es un conductor del motor de doble puente completo con una corriente de salida máxima de 600 mA por canal (hoja de datos). Que le implica al mismo tiempo coche 2 motores que tienen una demanda actual dentro de las limitaciones de la IC. En nuestro caso, estamos usando solamente un solo canal, lo que implica que vamos a usar el M1 en / M1 a puertos del módulo (Pins 2,7 y 3,6 respectivamente en el IC). Fin de que el motor conectado a este canal, tenemos que tirar el EN1 (pin 1) alta. El módulo que estoy utilizando ha proporcionado un arreglo simple puente para alambre duro esto, vea el cuadro para la referencia. Alternativamente se puede controlar este pin mediante su controlador. las conexiones de pasador son tal como se ilustra en la figura.
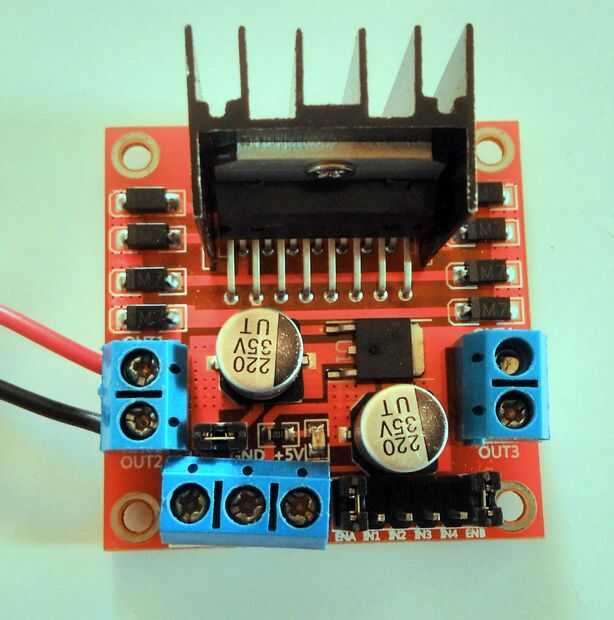
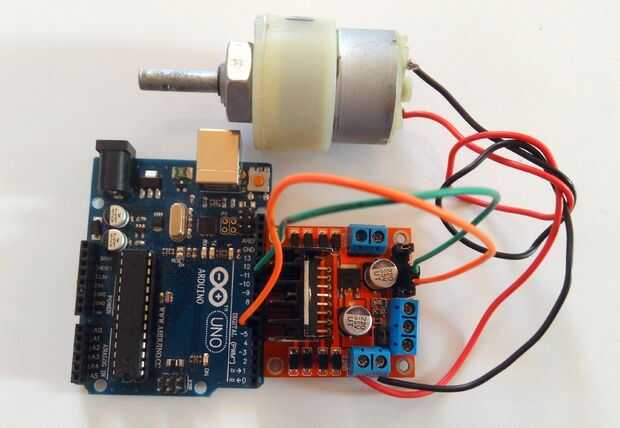
Conecte el conductor del Motor L298N
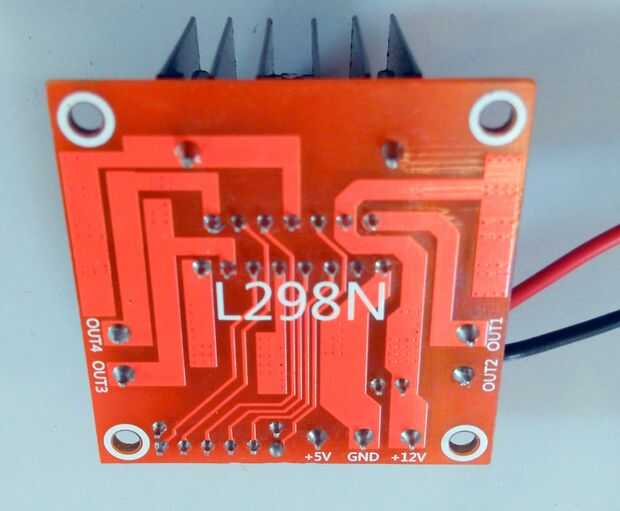
Similar a L293D, L298N también es un conductor del motor de doble puente completo con una corriente máxima de salida de 2A por canal. Utilizaremos un único canal es decir. M1, M2 (este modulo tiene una Convención de nomenclatura diferente en M1, M2 son las entradas y salida de M1, M2-Out son las salidas correspondientes) Datos hoja L298N
Cuando necesitamos más corriente como en el caso de un metal engranó el motor de la C.C., este controlador particular es una muy buena opción. Permite buen rendimiento, bajo la calefacción (aunque se recomienda el uso de un disipador de calor y la mayoría de los módulos disponible en el mercado viene con un disipador de calor). También es muy barato, eso ayuda.
Conecte el Motor Servo
Servo motores vienen en una variedad de tamaños y sus correspondientes calificaciones de pares. A menudo vemos motores con un índice de esfuerzo de torsión más bajo utilizan engranajes de plástico, pero con más par valorar, engranajes de metal de uso.
Un servo motor tiene 3 cables que salen de él, viz señal, Vcc y tierra. Generalmente el código de color utilizado es el siguiente:
Señal > amarillo y naranja; VCC > rojo y blanco; Tierra > negro/marrón
Como regla general, es la forma más fácil de identificarlos, la más oscura es una tierra ligeramente brillante Vcc, es el más brillante es la señal.
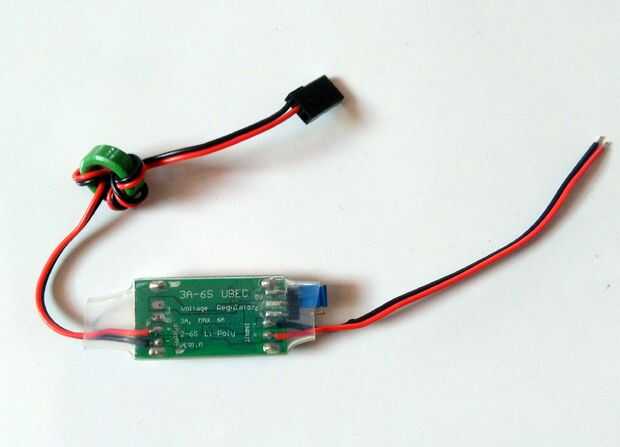
Si usas un micro servo como HK15178 , puede alimentar usando el pin de 5V en su Arduino. Sin embargo, cuando el requisito de corriente es mayor, el Arduino no puede suministrar suficiente corriente y por lo tanto, necesita alimentación externa. Vamos a utilizar un circuito Universal de eliminador de baterías (UBEC), que tiene un conveniente 5V/6V 3A salida. La razón por la que estamos utilizando este circuito sobre un regulador de voltaje simple 7805 es que el límite de corriente para el regulador de tensión es menor que la salida deseada para el control de un servo que es alrededor de 1.5 a 2 (dependiendo de su calificación).
PD: Si poder un servo de calificación más alto utilizando el Arduino, la Junta podría abruptamente reset y se comportan de una manera indeseable.
Conecte el módulo Bluetooth HC-05
Este paso es exactamente similar a la explicada en Smart teléfono controlado luces LED con HC-05 y la única diferencia aquí es que estamos utilizando análogo pines A0 y A1 como pines digitales (D14 y D15) para Rx y Tx de Arduino UNO.













