Paso 4: Firmware paso 2: límites de velocidad de ejes cartesianos, los pernos y corriente
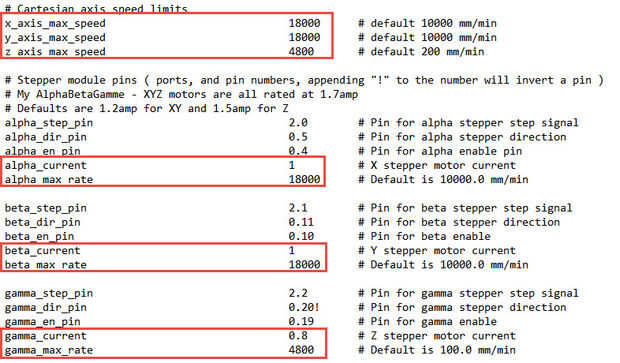
Las quiebras son 10000mm/min, que se traduce en 166mm/seg (para mantener la referencia a los usuarios de Marlin) que es suficiente para muchas impresoras. Tenga en cuenta cómo escribir valor por defecto/corriente en notas después del ajuste. Esto es una buena idea si (cuando) necesita hacer cambios.
Tengo 300mm/seg en mi 2 Ultimaker sin embargo, voy a poner en 18000 para XY y 4800 mi eje Z.
Pernos de
No estoy cambiando las patas en el momento, pero tenemos que escribir en el _max_rate para cada eje, que en una impresora cartesiana lo mismo que _axis_max_speed. No es el caso de las impresoras Delta.
Así que para alpha_max_rate y beta_max_rate entro en 18000 y de gamma_max_rate entro en 4800.
Tomar nota de la ! aparece después de cada _dir_pin - Esto denota la dirección de un eje, lo que significa que usted puede quitar o añadir ! si sus ejes se va al revés.
Volver atrás y modificar esto más adelante cuando sea necesario en lugar de cambiar alrededor de los cables, que no se pueden hacer, si utiliza los conectores apropiados en cualquier caso.
Corriente
Mis motores Nema de XYZ son clasificados en 3.2 voltaje y 1.7amp.
Si quisiera alimentar máximo que actual, podrá configurar el _current para mis motores 1.7 amp, pero los motores funcionaría más bien caliente entonces, así que voy a tratar de utilizando el 1 en lugar de otro que debe ser mucho.
He puesto mi motor Z a 0.8 amp como que realmente no está haciendo mucho trabajo traducir a: gamma_current 0.8






")



 - oscuro lado electrónica")


