Paso 8: Firmware paso 6: configuración de topes
Esta sección se ve muy confuso a primera vista, pero realmente no está mal, cuando en primer lugar averiguar cómo se ordena.
Smoothieware fuente: http://smoothieware.org/endstops
Dirección autoguiados hacia el blanco
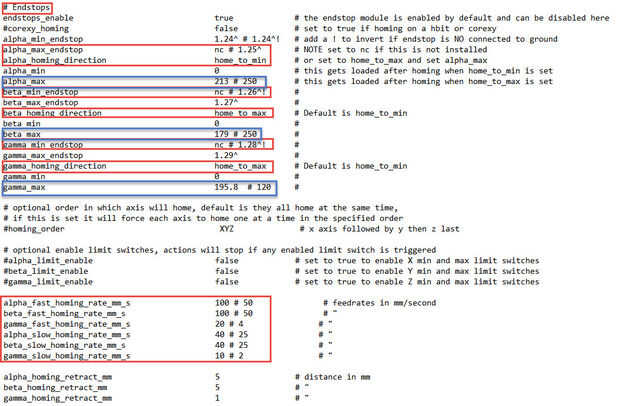
Permite dirección semiactiva configuración de nuestra impresora de estilo Ultimaker. Sabemos que casas para X min, Y max y max Z. Esto se traduce en:
- alpha_homing_direction home_to_min
- beta_homing_direction home_to_max
- gamma_homing_direction home_to_max
Desactivar topes
No uso X max, Y min y Z min topes, así que vamos a desactivarlos, escribiendo CN, que se traduce en Not CAirLive.
- alpha_max_endstop nc
- beta_min_endstop nc
- gamma_min_endstop nc
Definir tamaño de ejes
Tenemos que definir el tamaño de nuestra impresora. Esto se traduce en Software topes en Marlin.
- alpha_max 213
- beta_max 179
- gamma_max 195.8
Inversión de tope de salida
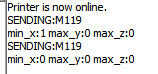
Salida de test mediante la emisión de un comando M119 a él. Esto se ve diferente que cuando se utiliza aguja, entonces en lugar de activa, obtiene un 1 si el tope es señalización de un golpe.
Si tiene un falso positivo necesita volver la señal de tope mediante la adición de un ! después del número pin.
Puedes ver cómo se me quitan las ! de mi alpha_min_endstop y cómo cambió la salida al comando M119 .
Sugerencia: No centrarse sólo en 1.24 y 1.27 1.29 que son los números, pero basta con mirar la!
Tasas de regreso rápidas y lentas
Tasa de recalada transfiere directamente mover velocidad mm/seg.
Subió _fast_homing_rate para X y Y a 100 y Z a 20. Las casas Ultimaker 2 Z max y solo toma edades para su inicio si se mantiene en su valor predeterminado.
Realmente tenía doble esta en Marlin, pero quiere probar un poco, antes de subir, ya que acaba de cambiar mi cama caliente a algo más pesado.
Al golpear el tope de los ejes se retrae un poco, donde la distancia definida en _homing_retract_mmy después se mueve lentamente. Esto se define por _slow_homing_rate algunos. Había subido estas bien, especialmente para mi Z ejes.






")



 - oscuro lado electrónica")


