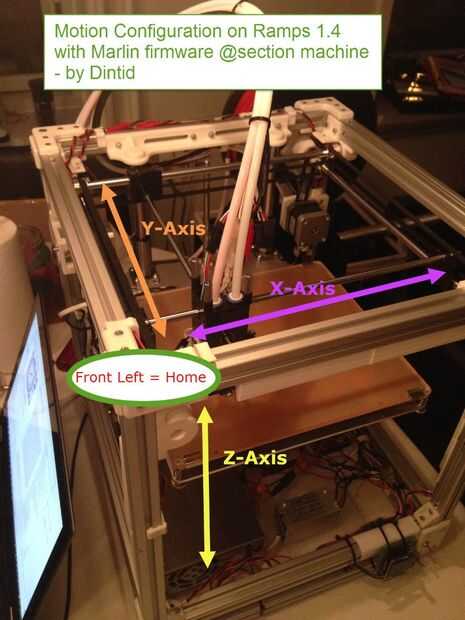
Como había prometido en mi última Instructables configuración topes en rampas 1.4 con firmware de Marlin - autoguiado hacia el blanco ahora ha llegado el momento de hacer un seguimiento. Esta vez acerca de la Configuración de movimiento.
Esto va a ser a, que completa el tutorial sobre la configuración de Control de movimiento en la compilación de las impresoras 3D en rampas 1.4 con firmware de Marlin. No haber Delta o CoreXY incluyen impresoras.
Voy a usar Pronterface/tiraje host programa para conectar mi impresora y tema comandos Terminal (códigos G). Que sonaba muy peludo, pero es solo un sencillo programa con una interfaz gráfica.
A pesar de que voy a utilizar rampas 1.4 y firmware Marlin 1.0.2, este tutorial será probablemente útil para la mayoría de configuraciones. Vamos a utilizar el nuevo IDE de Arduino para editar el firmware de Marlin.
Lo que cubrimos en este Instructables:
- Dirección paso a paso
- Dirección autoguiados hacia el blanco
- Topes de software
- Algunos retoques finales
- Página de inicio rápido
- Babystepping
- Conjunto de todos
Pequeño cambio desde la última:
Mi última instructable fue realizada utilizando la Versión candidata 2 del firwmware Marlin. Debido a algunas incompatibilidades que tenía que cambiar el firmware más reciente estable , tan el diseño se cambia un poco de las imágenes en el anterior Instructables. Que significa que hice nuevas imágenes para esta :)
Requirments
- Es necesario/es necesario que tenga configuración de tus topes antes de empezar en este Instructable.
- Necesita han definido medidas para sus steppers. Usted puede encontrar calculadoras aquí:
http://RepRap.org/wiki/Triffid_Hunter's_Calibration_Guide







")




