
Esto va a ser a, que completa el tutorial sobre la configuración de topes en la compilación de las impresoras 3D en rampas 1.4 con firmware de Marlin.
Voy a usar Pronterface/tiraje host programa para conectar mi impresora y tema comandos terminal (códigos G). Que sonaba muy peludo, pero es solo un sencillo programa con una interfaz gráfica.
Aunque voy a usar rampas 1.4 y el firmware de Marlin, este tutoral probablemente será útil para la mayoría de configuraciones. Vamos a utilizar el nuevo IDE de Arduino para editar el firmware de Marlin.
Configurar topes a menudo hierve abajo a ser metódico en encontrar fallas, por lo que está causando tantos problemas para muchas personas, tantas esperanza puede y tratar, simplemente conecte la impresora y lo espero que funciona. Lo que hace rara vez.
Si no funciona puede ser tentador hacer erupción con la esperanza de una solución rápida, que a su vez tiende a compuesto los temas y hacerlo mucho peor.
Síntomas comunes de topes defectuoso son motores/ejes que se niega a moverse, moverse en la dirección equivocada o mover un poco esto y entonces de esa manera.
En definitiva: establecer topes correctamente no sólo es recomendable, pero es obligatorio antes de comenzar a configurar el movimiento, incluyendo autoguiado hacia el blanco - configuración de los ejes.
En este tutorial vamos a:
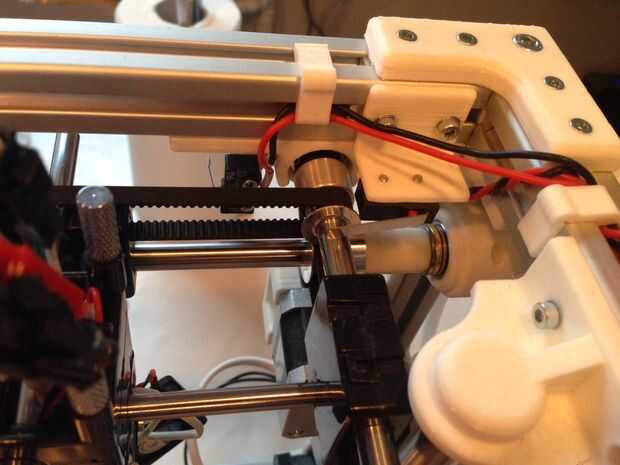
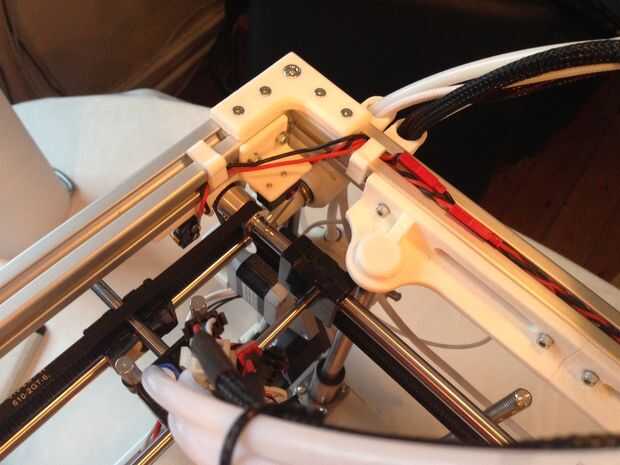
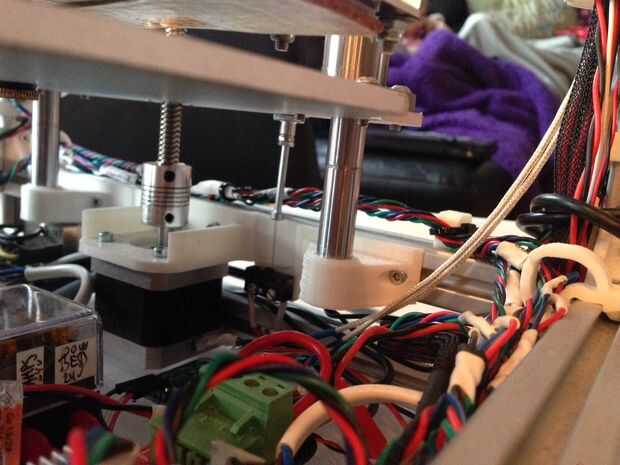
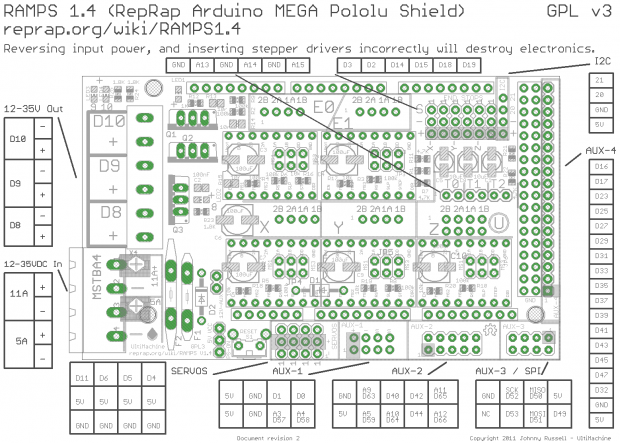
- Explorer tope físico
![]()
en rampas 1.4 Junta.- Conectar topes pin 2 y 3.
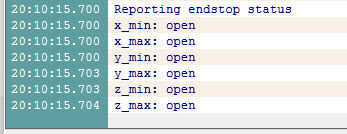
- Estatus de tope y configurar firmware Marlin autoguiado hacia el blanco con Pronterface y el nuevo IDE de Arduino
- Todo hecho. Listo para la configuración de movimiento.








")



