Configuración de distancia fija entre coche elegante y cosas por Impulsión del Motor de expansión Junta escudo L293D para Arduino
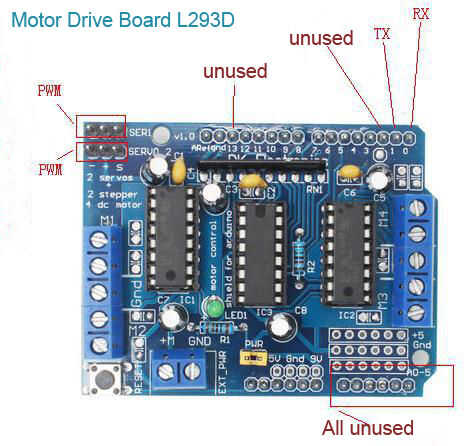
Este tutorial dará el código para mostrar cómo establecer una distancia fija entre un coche robot inteligente y sujetos por L293D Junta de www.ICStation.com. tenemos eso impulsión del escudo y mucha gente piensa que puerto COM de tablero L293D se ha tomado, realmente no. Puedes encontrar no hay ningún cable conectado con los pernos, y podemos utilizarlos mucho. El puerto PWM (patillas 10 y 9) puede ser conectado con el volante motor y demás. Pin0, 13 1, 2 y perno deben soldarse por plancha. Pin0 es PX, pin1 es TX, y cuando se conecta con el módulo de WIFI bluetooth o puerto, L293D puede ser control inalámbrico.
Puerto 2 y 13 esté disponible, nos podemos conectar con el Módulo de ultrasonidos para la distancia.
#include
int inputPin = 13;
int outputPin = 2;
AF_DCMotor motor1 (1, MOTOR12_64KHZ);
AF_DCMotor motor2 (2, MOTOR12_64KHZ);
void setup()
{
Serial.Begin(9600);
pinMode (inputPin, entrada);
pinMode (outputPin, salida);
motor1.SETSPEED(150);
motor2.SETSPEED(180);
Serial.println ("Motor prueba!");
}
void loop()
{
digitalWrite (outputPin, bajo);
delayMicroseconds(2);
digitalWrite (outputPin, HIGH);
delayMicroseconds(10);
digitalWrite (outputPin, bajo);
int distancia = pulseIn (inputPin, HIGH);
distancia = distancia/58;
Serial.println(Distance);
Delay(50);
Si (distancia = 50)
{
Serial.Print("Tack");
motor1.Run(release);
motor2.Run(release);
}
Si (distancia < 120)
{
Serial.Print("tick");
motor1.Run(Forward);
motor2.Run(Forward);
}
Si (distancia > 50)
{
Serial.Print("Tock");
motor1.Run(backward);
motor2.Run(backward);
}
}



")









