Paso 20: Crear una Base para los Servos

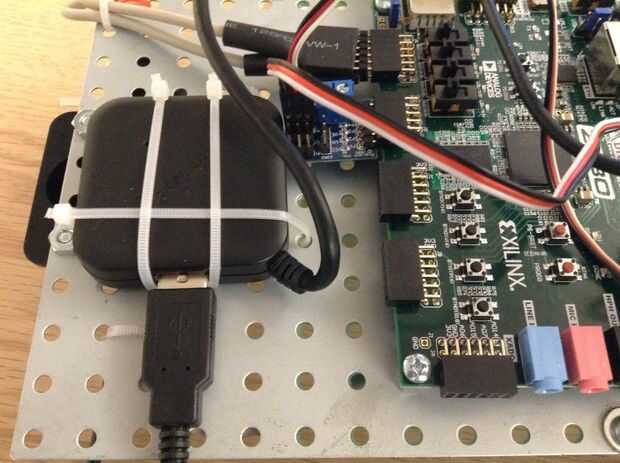
Usando los tornillos de 3/4 de pulgada. Una de las ruedas de espinas-hub conectar a la parte delantera derecha de la Zybot. Luego conecte el servo a la rueda. Usted puede encontrar la necesidad caliente pegamento el servo en la rueda si terminas manejando el Zybot demasiado violentamente.
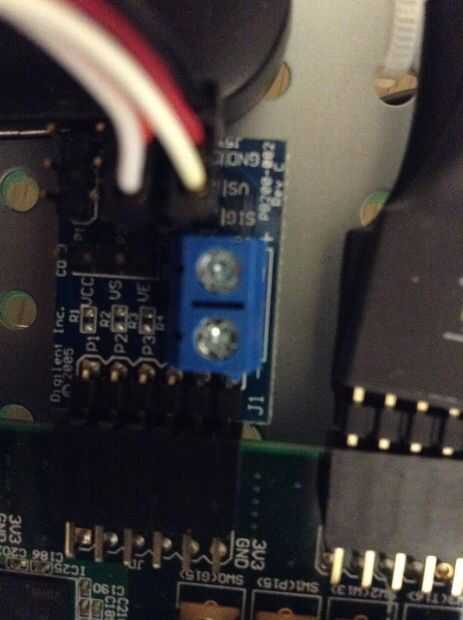
Conecte los servos en el PmodCON3, prestando atención a la alimentación y tierra y la cámara al concentrador USB.





 | Servo")
")



