Paso 1: Componentes de un Robot de una pulgada cúbica
Señor cubo R-16, es el decimosexto robot que he construido. Es un robot de una pulgada cúbica que mide 1 "x 1" x 1 ". Es capaz de comportamiento programable autónomo o puede ser remoto controlado. No pretende ser otra cosa que es muy práctico o útil. Es sólo un prototipo y prueba de concepto. Sin embargo, es útil en el sentido de que construir un pequeño robot te permite perfeccionar tus habilidades de miniaturización para robots y otros circuitos pequeños.
Construcción de circuitos y pequeños Robots
Tenga en cuenta que edificio tan pequeño como los medios posibles que puede tomar dos veces mientras normalmente llevaría a construir el mismo circuito en un espacio más grande. Todo tipo de pinzas es necesarias para mantener los cables y componentes pequeños en su lugar mientras se suelda o pega. Una luz brillante trabajo y un buen auricular lupa o una lupa fija son una necesidad.
Pequeños motores
Resulta que uno de los mayores obstáculos para hacer robots muy pequeños es el motor del engranaje que se requiere. La electrónica de control (microcontroladores) sólo cada vez más pequeños. Sin embargo, no es tan fácil encontrar baja rpm motores del engranaje que son lo suficientemente pequeños.
El Sr. Cube utiliza motores pager diminutos que están orientados en una proporción de 25: 1. En ese engranaje, el robot es más rápido que me gustaría y un poco de TICs. Para montar el espacio, los motores tuvieron que compensarse con una rueda más adelante que la otra. Incluso con eso, se mueve hacia delante, hacia atrás y se vuelve fina. Los motores fueron conectados en el perfboard con alambre de calibre 24 que fue soldado y luego pegar con cemento de contacto. En la parte trasera del robot un tamaño de 4-40 nylon perno fue atornillado en un agujero golpeado ligeramente por debajo de la platina de fondo. Esta cabeza del perno plástico lisa actúa como un lanzador para balancear el robot. Se puede ver en la parte inferior derecha de la foto 4. Esto da una separación de la rueda en la parte inferior del robot de aproximadamente 1/32".
Para montar las ruedas, las 3/16" poleas de plástico montadas en los motores fueron accionadas para arriba y entonces, mientras giro, fueron enarenadas con el diámetro correcto. Entonces fueron insertados en un agujero en una arandela de metal que encajan dentro de una arandela de nilón y todo se ajustaron juntos. La rueda entonces fue cubierta con dos capas de caucho líquido de la cinta para darle tracción.
Baterías pequeñas
Otro problema con los robots más pequeños es encontrar baterías pequeñas que durarán. Los motores de engranaje requieren corrientes bastante altas (90-115ma) para funcionar. Esto resulta en un pequeño robot que se come las baterías para el desayuno. Lo mejor que pude encontrar en el momento, eran pilas botón litio 3-LM44. La duración de la batería en muy pequeños robots de este tipo, es tan corto, (unos minutos) que generalmente no se hacen nada cercano a práctica.
Había sólo espacio para las baterías tres 1.5v, por lo que terminaron por encender el motor y el controlador Picaxe. Debido a ruidos eléctricos que los motores DC pequeños pueden crear, una fuente de alimentación para todo, no suele ser una buena idea. Pero hasta ahora está funcionando bien.
El espacio en este robot de una pulgada fue tan fuerte que el espesor del aislamiento del cable de 28 calibre (del cable de cinta) resultó para ser un problema. Apenas pude poner las dos mitades del robot juntos. Calculo que alrededor del 85% del volumen del robot está lleno de componentes.
El robot era tan pequeño que incluso un interruptor on-off era problemático. Eventualmente, podría cambiar los bigotes crudos con sensores infrarrojos. Literalmente he ejecutado sin espacio fácil de usar, nada apropiado, sin recurrir a la tecnología de montaje superficial, sería un reto interesante.
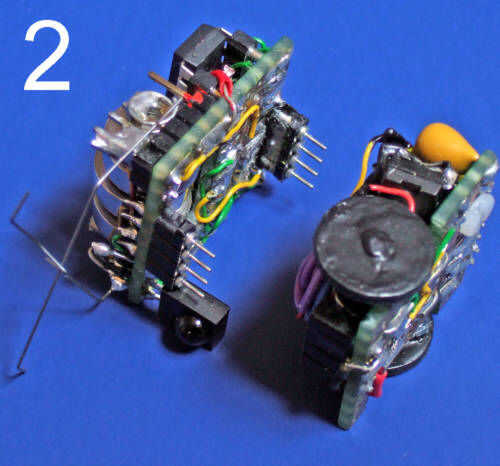
Me gusta usar construcción de cubierta para los robots de verdad pequeños. Ver foto 2. Esto consiste en dos mitades que junto con. 1" tira encabezados y zócalos. Esto da acceso fácil a todos los componentes, haciéndolo más fácil de depurar los circuitos o realizar cambios.
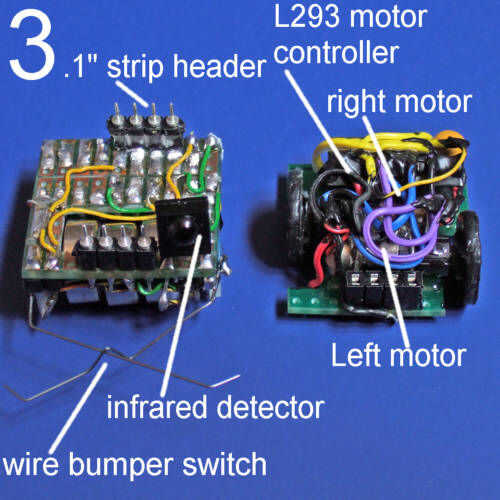
Foto 3 muestra la ubicación de algunos de los componentes principales.
MATERIALES
2 motores de engranaje GM15 - 25: 1 6 mm Motor del engranaje planetario de localizador: http://www.solarbotics.com/motors_accessories/4/
18 x Picaxe microcontrolador disponible desde: http://www.hvwtech.com/products_list.asp?CatID=90&SubCatID=249&SubSubCatID=250
Regulador del motor L293 DIP IC: http://www.mouser.com
Detector infrarrojo de Panasonic PNA4602M: http://www.mouser.com
Alambre de magneto (soldable) segregables de calor de Beldsol AWG 30: http://www.mouser.com
3 LM44 1.5V. Pilas botón litio: http://www.mouser.com
Pequeño azul de encendido-apagado: http://www.jameco.com
Delgado soldadura -. 015" resina base soldadura: http://www.mouser.com
Resistencias y un condensador de tantalio de 150 uf
. 1" cobre de fibra de vidrio trazado perfboard desde: http://www.allelectronics.com/cgi-bin/item/ECS-4/455/SOLDERABLE_PERF_BOARD, _LINE_PATTERN_.html
Performix (TM) líquido de la cinta, negro disponibles en Wal-Mart o en http://www.thetapeworks.com/liquid-tape.htm
")








")


