Paso 2: Circuito de un Robot de una pulgada cúbica
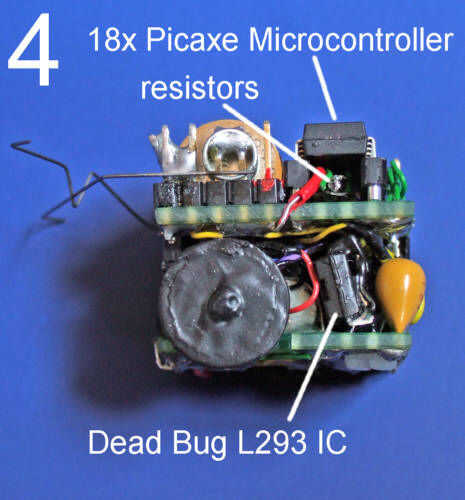

18 x Microcontoller Picaxe
Microcontroladores PICAXE siguen siendo mis favoritos Controladores para utilizar en robots experimentales. Aunque tienen menos memoria y no son tan rápidos como PicMicros, Arduino, Basic Stamp u otros microcontroladores, son lo suficientemente rápidos como para los más pequeños robots experimentales. Varios de ellos pueden fácilmente conectarse cuando se necesita más velocidad o memoria.
También son muy indulgente. Directamente he les soldado, les pone en cortocircuito y sobrecarga sus salidas y todavía tengo que quemar uno. Porque puede ser programados en el lenguaje de programación básico, también son fáciles de programar que la mayoría de microcontroladores. Si usted quiere construir realmente pequeño, 08 M y los 18 controladores de x Picaxe están disponibles en forma de montaje en superficie (circuitos integrados de SOIC Small Outline).
Para ver algunos de los proyectos que puedes hacer con microcontroladores Picaxe en que puedes echar un vistazo:
http://www.inklesspress.com/picaxe_projects.htm
L293 Regulador del Motor
El regulador del motor L293 es una excelente manera de controlar dos motores de cualquier robot pequeño. Cuatro clavijas de salida del microcontrolador pueden controlar la energía de dos motores: adelante, reversa o apagado. El poder de los motores incluso puede ser pulsada (modulación de anchura de pulso PWM) para controlar su velocidad.
Estilo del insecto muerto
No había sitio en el perfboards para montar el controlador L293 por lo que se instaló utilizando la técnica del insecto muerto. Esto simplemente significa que el IC está al revés y los alambres finos soldados directamente a los pines doblados o recortados corto. Entonces puede ser pegado sobre una placa de circuito o colocado en cualquier espacio disponible.
En este caso, después de que el L293 era soldado y probado, recubierto con dos capas de caucho líquido de la cinta siempre útil para asegurar que nada pone en cortocircuito hacia fuera cuando estaba abarrotada en el espacio disponible. También se podría utilizar cemento de contacto transparente.
Para un muy buen ejemplo de la construcción de circuitos utilizando el estilo de bicho muerto, mira aquí: http://www.bigmech.com/misc/smallcircuit/
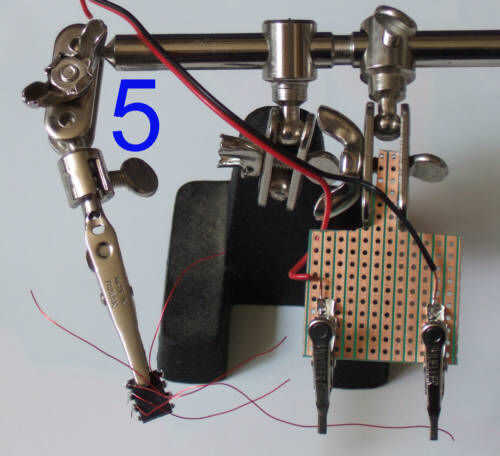
Foto 5 muestra una ayuda de las manos de la soldadura de plantilla que he modificado añadiendo pequeñas pinzas a un perfboard para ayudar a soldar los cables pequeños a ICs en el estilo de bicho muerto.
Foto 6 muestra el esquema para el robot de Sr. Cube.
Puedes ver un video del Sr. Cube haciendo una corta secuencia programada haciendo clic en el siguiente enlace de pulgadas-robot-sm.wmv.
Muestra el robot en alrededor del 30% de la velocidad máxima que ha sido reducido mediante modulación de anchura de pulso en los motores.
")








")


