Paso 5: Sr. cubo dos: hacer un Robot de 1/3 pulgada cúbica
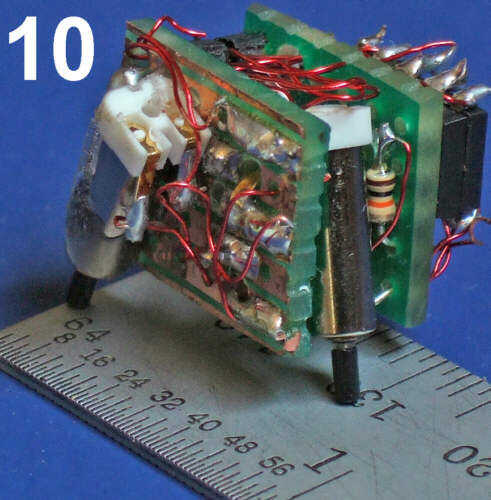
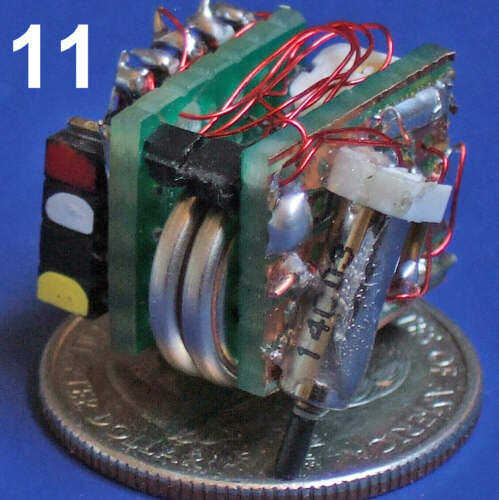
Después de hacer un robot de una pulgada cúbica que funcionaba, tenía que probar algo más pequeño. Yo estoy buscando un robot alrededor de 1/3 de pulgada cúbica. En este punto, Sr. cubo de dos es aproximadamente.56" x. 58" x.72 ". Cuenta con un microcontrolador Picaxe 08 que le permitirá moverse de forma autónoma. Foto 10 muestra el robot en una regla. Foto 11 muestra el otro lado del robot en un cuarto. Las dos baterías son baterías de litio 3 v cr1220 y queda por ver si tienen capacidad suficiente para alimentar los motores y el Picaxe. Pueden necesitarse más baterías.
Es un trabajo en progreso. Hasta ahora los dos motores pager funcionan bien para mover y girar el robot en las superficies lisas. El microcontrolador Picaxe se ha instalado y ha sido programado y probado. Todavía que añadir son el regulador del motor L293 SOIC y el sensor infrarrojo reflector.
Cuando haya terminado, se trata de uno de los más pequeños robots autónomos alrededor con sensores y un microcontrolador. ¿Mientras que esto es un pequeño robot, hay pequeños robots amateurs que son programables? Sí, ciertamente. Ver:
1cc Robot: http://diwww.epfl.ch/lami/mirobots/smoovy.html
pico Robot: http://poor-robot.com/pico/
")








")


