Paso 3: Instalación de Python y configuración
2013-02-09-sibilancias-raspbian.img
Podemos comprobar la versión de python usando el terminal para verificar.
Copiar y pegar en la LXterm
Python - versión
Para los ejemplos que vamos a repasar es aconsejable utilizar Python versiones 2.6 o posteriores. Si no está instalado Python en tu sistema que puede utilizar apt-get concedida que el Raspberry Pi está conectado a Internet.
Copiar y pegar en la LXterm
sudo apt-get install python2.6
Instalar algunas de las dependencias
sudo Apto-conseguir instalar python-serial
Copiar pegar en el LXterm
sudo Apto-conseguir instalar python python-tk idle python-pmw python-imaging
A continuación Descargue y coloque los siguientes archivos a la carpeta pi.
scanports-arduino.py
term.py
Buttons.py
Ahora tenemos que los programas ejecutables con el comando chmod
Copiar y pegar en LXterm
sudo chmod + x /home/pi/scanports-arduino.py
sudo chmod + x /home/pi/term.py
sudo chmod + x /home/pi/Buttons.py
Los programas de ahora deben ser ejecutables y podemos ejecutar haciendo doble clic o a través de terminal. El último paso es descargar y cargar el sketch con el IDE de Arduino.
Si no está familiarizado con Arduino y su IDE puede leer para arriba en él aquí.
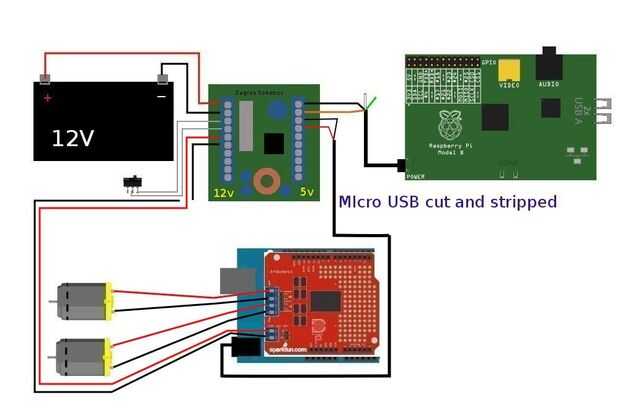
Y por último se refieren al esquema anteriormente para configurar las conexiones a la base del robot.













