Este diseño está basado o inspirado en botchoy y la sala del robot.
Se celebra cada año Atlanta Hobby robotics polyathlon. Requiere construir un robot algo flexible que se puede hacer tales cosas como encontrar objetos y empujarlos fuera de tablas, seguir líneas, cómputo muerto y el asesino de Faro. He encontrado que la competencia asesina de Faro el más difícil. Requiere construir un sensor de Faro y el robot que es hasta 10 pies de distancia. Los competidores traen su propio Faro así su literalmente lo que el constructor de sueños para arriba como un faro puede ser utilizado. El faro debe ser capaz de trabajar en una ruidosa habitación bien iluminada. Así que un simple sonido sensor o sensor de luz no funcionen. También son obstáculos para evitar así que el sensor no puede interferir con sus sensores de detección de obstáculo. Después de leer lo que otros tenían doe y teniendo en cuenta que tengo una falta de habilidad electrónica o las piezas para construir un sensor de microondas, ni podía interferir mis sensores de sonar me quedé con la solución de luz polarizada.
Luz polarizada se filtra luz con todas las ondas de luz orientadas en una dirección similar. Luz normal tiende a meneo hasta abajo o de izquierda a derecha. Si pones un filtro delante de la luz y un filtro que está orientada a lo mismo que el filtro delante de la luz, verá la luz (un poco reductor de luz). Si orientar el filtro delante de los ojos gira 90 grados la luz polarizada no será mucho más oscuro y puede ser bloqueada totalmente dependiendo de la calidad de los filtros.
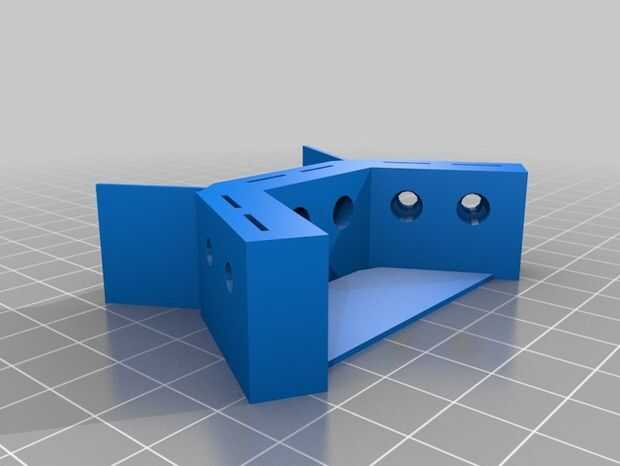
El faro es aprovecha estos filtros poniendo dos LDR (resistencias dependientes de luz) apuntando en la misma dirección. Cada sensor habrá polarizado película delante de ella pero uno será orientada verticalmente y otra horizontalmente. Esto le permitirá tomar un voltaje de cada sensor y si está apuntando a un valor de un sensor de luz polarizado será muy diferente de la otra. Si están apuntando hacia una fuente de luz no polarizada entonces los sensores tendrá una lectura de voltaje similar y su diferencia será cero.
Los sensores se conectarán a las entradas analógicas de una placa de arduino para hacer las lecturas. Arduinos tienen un mínimo de 6 entradas analógicas, así que vamos a utilizar seis salidas en este sensor. Es posible conseguir lejos con solo 3 entradas pero he intentado esto antes y no es tan predecible como con seis salidas para que costumbre ir sobre método del sombrero.










")
")

