Paso 12: En la conexión hasta el robot!

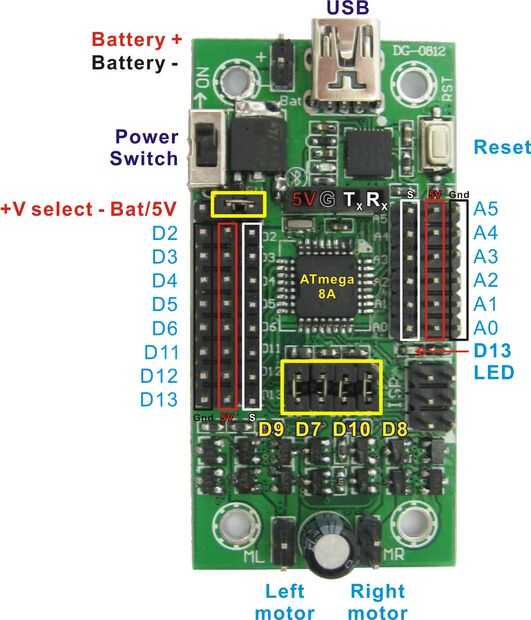
A diferencia de las placas Arduino estándar, este controlador tiene algunas características extras, lo que es particularmente adecuado para pequeños robots. Tiene un controlador dual de motor DC que puede manejar hasta 2.5A por motor y servos pueden enchufarse directamente en el PCB.
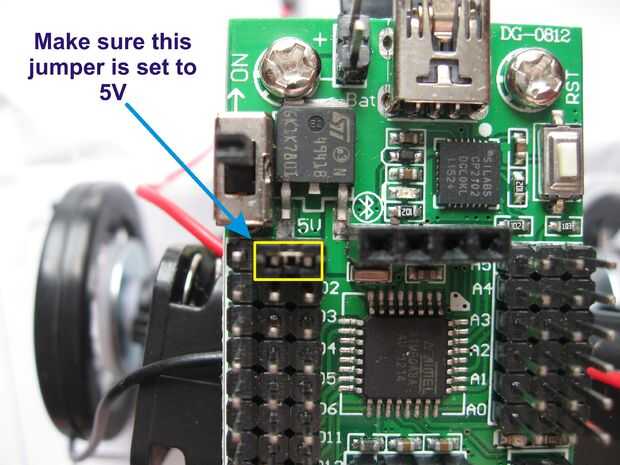
Los pines de I/O digitales se terminan en un encabezado de macho de 3 pines que incluye alimentación de servos y sensores. El poder puede ser seleccionado entre + 5V o + voltaje de la batería. Normalmente + 5V se utiliza. Si selecciona + batería entonces usted solamente debe conectar servos a estos pines como una tensión de batería superior a 5V pueden dañar los pines digitales.
Bot de Doodle tiene 2 sensores digitales y un pequeño servo que no sea bajo carga pesada, así que tenemos que seleccionar + 5V para evitar daños en las entradas digitales.
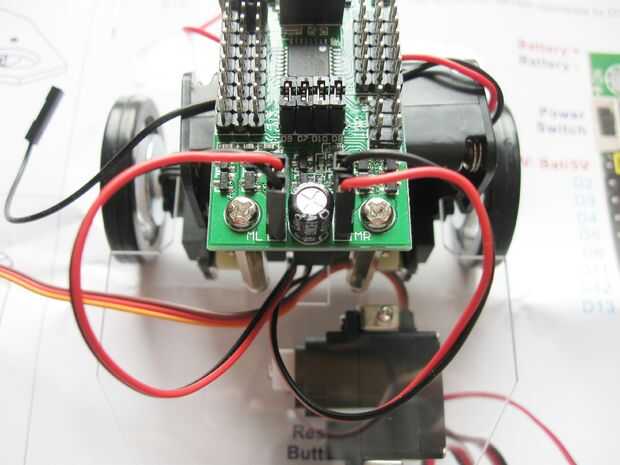
A continuación tenemos que conectar los motores. Se puede ver en el tablero de control que las salidas del motor están marcadas "ML" y "Señor" para motor izquierdo y derecho. En el caso de Bot Doodle, la salida de "ML" es a la derecha y la salida de "Señor" es en el lado izquierdo. Esto es para que la toma USB es en la parte posterior del robot.
Conecte el motor adecuado a la salida de "Señor" y el motor izquierdo a la salida de "ML". Prestar especial atención al color de los cables. Cuando el robot ejecuta el código de ejemplo, el primer paso que debe hacer es viajar adelante a corta distancia, luego y gire hacia la izquierda.
Si bien el motor funciona al revés al principio del código de ejemplo entonces que motor necesita tener sus cables intercambiados sobre. Una vez que el robot ha ido hacia adelante y luego revertir un poco, si el robot gira primero hacia la derecha necesita intercambiar los motores izquierdos y derecho.
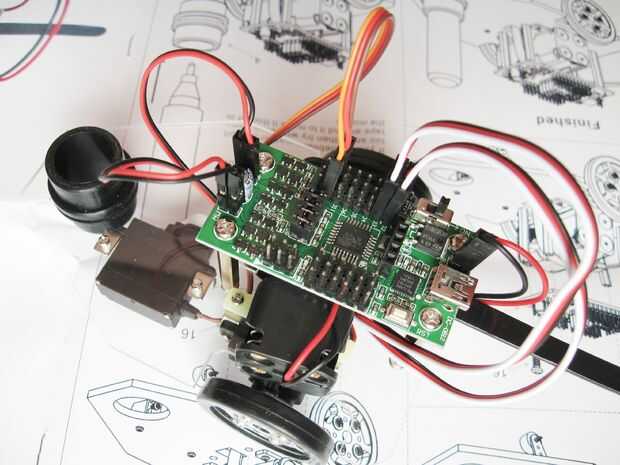
Asegúrese de que el interruptor esté en la posición off y conecte el soporte de la batería como se muestra. El controlador tiene protección contra polaridad inversa por lo que si accidentalmente conecta los cables al revés el robot no será dañado. simplemente no se enciende.
Ahora Conecte sus sensores de encoder de la rueda y el servo. Tenga en cuenta que el cable negro/marrón va siempre hacia el exterior del PCB. El cable blanco o amarillo es siempre más cercano al procesador.
Asegúrese de que el sensor de la rueda derecha conecta a D2 y el sensor izquierdo conecta con D3 otra forma el robot va a terminar corriendo en círculos con un motor parado y el otro motor de funcionamiento continuo.













