Paso 9: Microcontrolador y configuración GPS
Ahora podemos pasar a configurar nuestro ArduPilot Mega 2.6! Voy a referirme a él como APM de ahora en adelante.
En primer lugar, tome el cable microUSB y conecte a la APM. Debe encenderse para arriba cuando enchufa en-similar a un Arduino Micro.
Ir a la Página para descargar el planificador de misión y descargar la última versión. Planificador de misión es una interfaz GUI que Michael Oborne fácilmente la interfaz con el APM. Esto parece ser actualmente el método más fácil de usar para configurar tu APM. Puede utilizar otras herramientas o trabajar con él directamente a través de código (lo hice al principio), pero para un principiante, esta es probablemente la mejor opción.
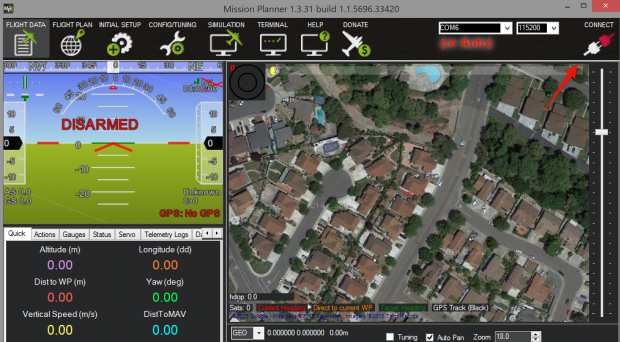
Tu planificador de misión debería verse algo como la imagen de abajo. Vas a seleccionar el puerto que está conectado hasta. Esto normalmente está marcado como COM6 en la zona superior derecha, pero también puede guardarlo en el Auto, y que debería detectar por sí mismo. Sólo tiene que pulsar siguiente Conecte, y podrás ver algunas barras de carga pop-up como se conecta.
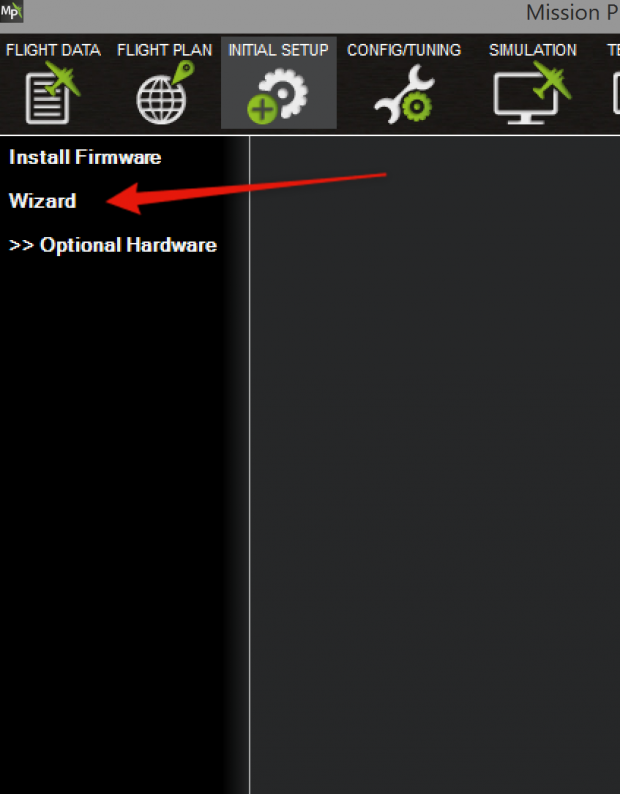
Ahora tienes que ir a la configuración inicial en la parte superior:

Y luego al asistente:
También habrá una opción para calibrar manualmente cada parte. Personalmente utilicé la calibración manual. Usted puede encontrar bajo la sección Hardware obligatorio (que aparecerá por encima de la sección de Hardware opcional). Desde aquí, que básicamente hacer lo que el asistente te lleva, sólo por su propia cuenta. Te sugiero que pegue con el asistente, ya que es la forma más sencilla de hacerlo. Si aún desea hacerlo manualmente, aquí está un video de YouTube gran utilizado para ayudar a guiarme a través de ese proceso.
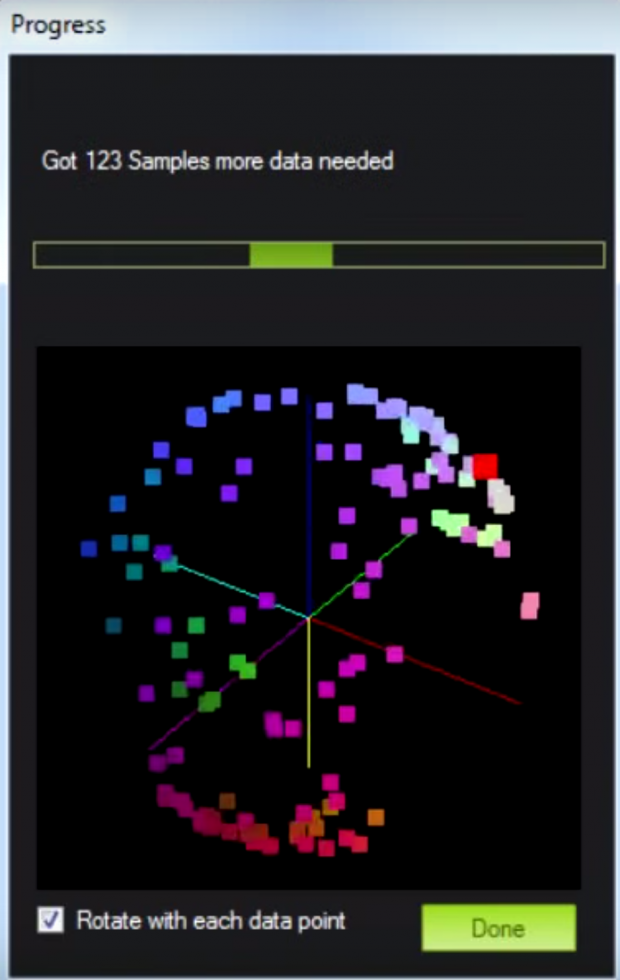
Al caminar a través del asistente, le pedirá que calibración de la brújula. 2.6 de la APM ha movido la brújula fuera de la unidad por lo que se puede montar de electrónica para evitar interferencias. Aunque esto tiene sentido, no encontré ninguna interferencia en mi brújula incluso cuando se ejecuta todos los motores a plena potencia. Cueste lo que cueste, para ello, tendrá que conectar su GPS de uBlox con tu APM. Esto puede hacerse fácilmente conectando el puerto GPS el GPS en el APM y el puerto del MAG en el GPS al puerto I2C de la APM. Al realizar la calibración, usted necesitará reunir los puntos de prueba para la brújula. Gire la brújula alrededor y guardar puntos de ruta de datos a medida que avanza. Esto probablemente tomará algún tiempo hacer lo correcto. Ahorré más de 2000 puntos para asegurarse de que fue perfectamente calibrado.






 clap switch kit para principiantes absolutos")




