Paso 8: Explicación de electrónica
Entonces, ¿cómo todos estos componentes electrónicos encajan entre sí para hacer algo que vuela? Me alegro de que pidió. Permite desde el principio: usted tiene un receptor en la mano con dos palos y posiblemente algunos otros interruptores, botones y perillas. Si tienes un transmisor del modo 2, entonces su aceleración (velocidad de los motores) será hacia arriba y hacia abajo en el stick izquierdo, yaw (torneado) quedará derecha el stick izquierdo, pitch (su ángulo hacia delante y hacia atrás, así como con un multicopter, mover hacia adelante y hacia atrás) será sus derecho palos arriba y abajo y rodillo (su ángulo izquierdo y derecho) será izquierda y derecha en el stick derecho. Un transmisor de modo 1 tiene el pitch y el acelerador en los palos opuestos. Nota: control de velocidad a un multicopter real difiere del acelerador en un dji o similar, en un dji, su válvula reguladora controla la altitud de tu helicóptero (e.g. regulación hacia arriba aumentará el helicóptero hasta que se suelte la palanca de aceleración en que punto será nivelar el helicóptero) donde como en un multicopter real, acelerador realmente controlará la velocidad de sus motores (mucho más útiles para acrobacias y carreras).
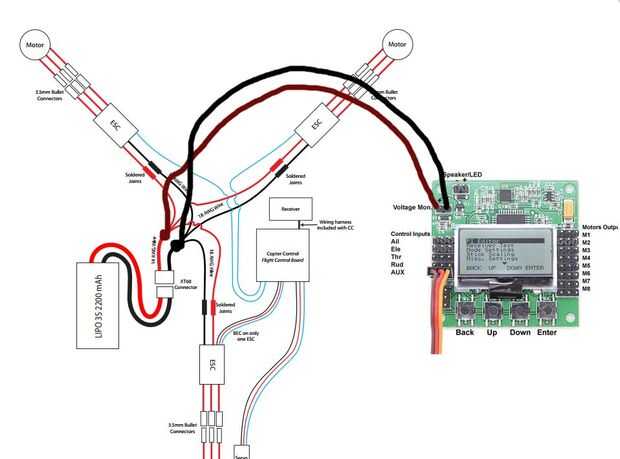
Con el transmisor y el receptor encendido y atado uno al otro, el receptor comenzará hacer salir señales leer ya sea por tus servos, reguladores (ESC) de la velocidad o en nuestro caso, nuestro controlador de vuelo FC). Todos estos aparatos pueden conectarse al receptor con los cables de servo normal con vienen estándar con los servos o de esc. En nuestro caso, tenemos que comprar conectores de servo para conectar nuestro receptor a nuestro controlador de vuelo (aparato) debido a la forma que el receptor está encendido, sólo necesitamos una conexión de carriles de la energía de la FC a los carriles de alimentación de receptores, entonces sólo tenemos que conectar los cables de señal de la FC con el resto de las salidas de los receptores.
La FC tiene un juego de salidas de su propio. En un quadcopter, estas salidas están conectadas a 4 ESC de que a su vez están conectadas a los motores. En nuestro caso, las tres primeras de nuestras salidas se conectará a CES y otro a nuestro servo de desvío. Para comprobar que ESC conecta a salidas que la fc podemos comprobar el diseño de motor en la configuración de KK2 (la KK2 voluntad aoutomatically establecerse al modo quadcopter por lo que probablemente debería seguir adelante y cambie al modo de tricopter que también ya pre instalado).
El ESC se alimenta directamente de la batería para suministrar voltaje a los motores tan directamente como sea posible. Para conectar tres ESC s una batería que debemos comprar o construir un mazo de cables (demostrado más adelante). Al conectar la salida a la batería, asegúrese de no salida del alambre hacia atrás lo contrario observará lo que el mundo RC gusta venir "magia humo" de la ESC. ESC tiene dos entradas (uno para la batería y otro para la señal, así como dos salidas (la mayoría de las veces) un BEC (circuito eliminador de batería) regula salida de 5v (conectado al mismo cable de servo como la señal de entrada) y una salida de potencia del motor. Si usted compra un opto ESC (u otras diseñados especialmente para multicopters) no pueden tener los 5v de la salida para alimentar el receptor y el FC. Para evitar esto que usted necesitará comprar un UBEC 5v (BEC universal) que es un BEC externo que proporcione 5v limpia para todos su 5v alimentado equipo (o cualquier otra tensión que requiere). El BEC en mayoría ESC es alimentar el receptor y en nuestro caso, nuestro FC así. Tenga en cuenta que la primera salida de la KK2 está conectada a su propio carril de alimentación que también alimenta el controlador de vuelo y el receptor. El resto de las salidas están conectadas a su propio carril de alimentación separada que está ahí para proporcionar energía limpia a su FC así como el poder limpiador de un servos tricópteros o duocopters (si todas las salidas fueron conectadas en el mismo riel de energía entonces el FC, receptor y servos todos se tiran de energía desde un BEC que podría conducir a una gran cantidad de interferencia). Esta situación de tren de potencia significa que sólo dos ESC necesitan sus BEC a las cosas de poder (el primer ESC la FC y receptor y el segundo para el carril de salida de energía) que a su vez significa que para un tricopter o cualquier cosa con más de dos ESC (quad, hexagonal, octo) puede cortar la energía desde el BEC extra a la Junta (acabo de recogidos de los dos cables en ellos mismos y utilizan termoencogibles para mantenerlos de cortocircuito y mantener en su lugar) lo hacemos para detener la interferencia causada por múltiples BEC de conectados a la misma potencia de ferroviario. Si su servo de guiñada es capaz de dibujar más de 5v o demasiado nervioso puede cortar BEC de la segunda ESC y proporcionar energía al ferrocarril de energía salidas vía un UBEC más poderosos o más confiable (ESC BEC son conocidos por ofrecer salidas inestables debido a la conmutación constante necesaria para hacer girar el motor) dando su guiñada más punch y una respuesta más rápida y poder limpiador. Desafortunadamente, aunque tengo un UBEC, nunca conseguí alrededor de instalar en cualquiera de mi tri porque nunca he visto una necesidad aparente para él.
Si nada de esto parece tener sentido, confía en mí, tiene mucho más sentido cuando tienes las piezas en sus manos. Recuerde no enchufar la ESC en la batería al revés y usted debe ser fino. Un Consejo práctico (que definitivamente no siempre funciona) es que los alambres de grueso similar a menudo se conectarán a la misma cosa por ejemplo, los cables desde la batería y lleva a la ESC son relativamente gruesos como llevan mucha corriente como son los cables de salida al motor por la misma razón. Del mismo modo, los pernos pequeños procedentes de la FC y el receptor se pueden conectar uno al otro y a través de cables finos, así como a la ESC y servo a través de los alambres finos.
La imagen de arriba no es mio, robaron de este hilo. Como tal tiene un problema. Lo positivo y negativo de debe de la ESC frente dos ser conectado al controlador de vuelo mientras el positivo y negativo de la parte posterior ESC a la FC no debe conectarse a la FC.


")


")
")






