Paso 7: Construir STEMbot1 - un Robot que hace de programación fácil y divertida
--------------------------------------------
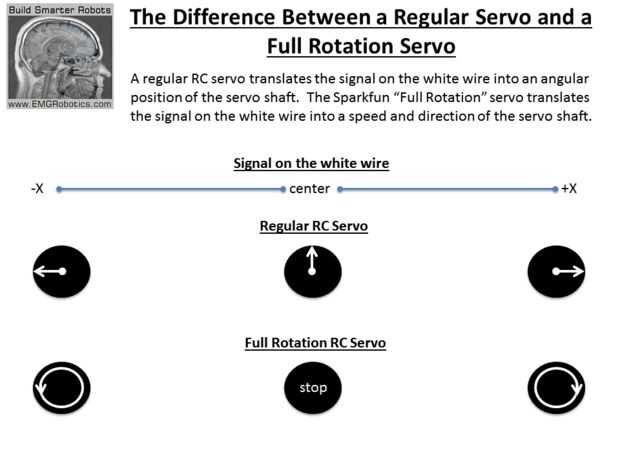
El Servo de rotación completa de Sparkfun ( https://www.sparkfun.com/products/9347 ) requiere el controlador de servo de A2SCB_ML a estar en modo "absoluto". Esto se hace mediante la eliminación de los puentes (esto es la configuración predeterminada como se envía).
Después de verificar los servos han sido enchufados el A2SCB_ML correctamente enchufe (cable de servo negro hacia el borde del tablero) el A2SCB_ML en gato del auricular del teléfono inteligente.
EL ROBOT PUEDE MOVERSE AL HACER LOS SIGUIENTES PASOS
Utilice el interruptor en el soporte de la batería 4AA para activar el robot. Usted verá las luces en un abrir y cerrar A2SCB.
EN el SMARTPHONE van a esta URL: http://buildsmartrobots.ning.com/profiles/blogs/stembot1-wav-files
Suba el volumen en el smartphone a MAX. Haga clic en la URL stop.wav . Reproducir el archivo WAV.
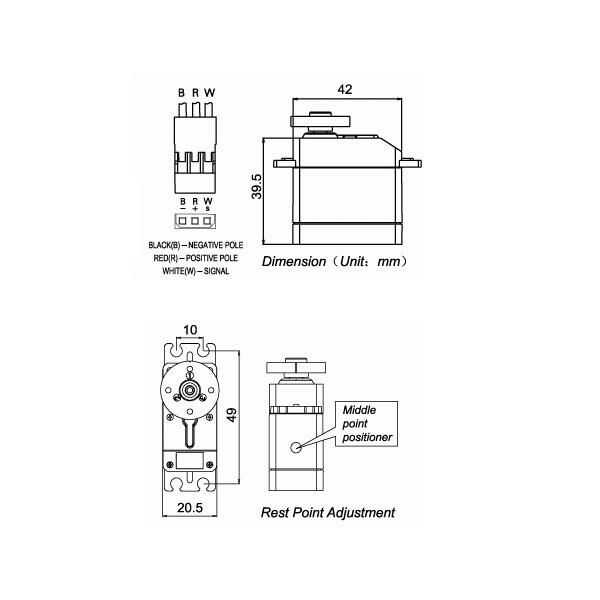
En este punto, pueden estar cambiando las ruedas en su robot. Con un pequeño destornillador, ajuste el "punto de descanso" girando el potenciómetro en el servo detrás el agujerito con la etiqueta a "punto medio posicionador" como se muestra en las imágenes.
Ajuste el "punto de descanso" hasta que el servo deja de girar. Hacer esto para cada servo.
EN el SMARTPHONE van a esta URL: http://buildsmartrobots.ning.com/profiles/blogs/stembot1-wav-files
Suba el volumen en el smartphone a MAX. Haga clic en la URL slowforw.wav . Reproducir el archivo WAV.
Tanto rueda debe girar hacia adelante, y el robot debe comenzar moviendo hacia adelante.
EN el SMARTPHONE van a esta URL: http://buildsmartrobots.ning.com/profiles/blogs/stembot1-wav-files
Suba el volumen en el smartphone a MAX. Haga clic en la URL slowright.wav . Reproducir el archivo WAV.
En este punto, el servo se han ajustado y probado el robot. Es hora de empezar a programar el robot.


")










