Paso 1: Del concepto a la realidad
Considera las características requeridas:
Embalse de licor (yo quería por lo menos 3 envases de mínimo 500ml cada volumen)
Bandeja para vasos de chupito (quería en hasta 4 tiros se sirve a la vez)
Interfaz humano (controles para la selección del tipo de licor que intuitivo)
Selector de licor (un mecanismo que elija el tipo seleccionado de licor para dispensar)
Suministro de regulador de volumen (un mecanismo que permite el control de volumen de líquido por disparo)
Inicialmente, la idea era utilizar el brazo robótico y fije un licor dispensación mecanismo a él directamente, pero esto resultó para ser difícil debido a varios factores. En primer lugar, no tenía válvulas de tamaño adecuadas por lo que era difícil averiguar cómo transportar el líquido en el depósito en el brazo sin interrupción. En segundo lugar, tenía 1/4" tubería (origen localmente en un almacén del hardware) pero no era el tipo de silicona y por lo tanto no muy flexible (demasiado esfuerzo de torsión se requiere para el servo).
La siguiente idea fue que el dispensador estacionario y la bandeja con la mudanza de gafas debajo de él. Esto tenía algunas ventajas: necesidad de un sector de mecánica licor como la bandeja sólo podía moverse en el contenedor de licor seleccionado, y se necesitarían menos par de torsión para el servo principal puesto que la bandeja es horizontal y el peso de los vidrios (actuando verticalmente) no podría estar respaldada a través de la estructura.
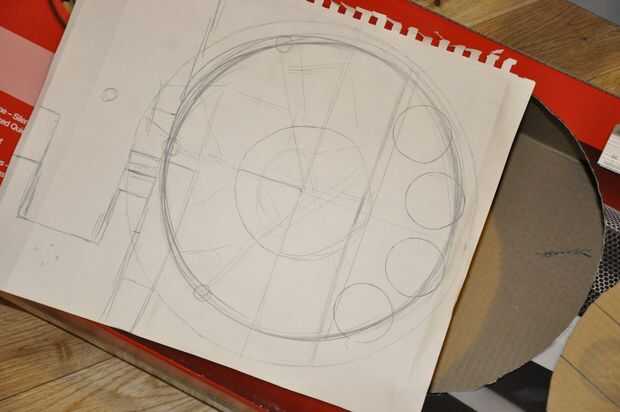
Las imágenes a continuación resaltar algunas de las ideas, con ellos evoluciona el dibujo final en el final. Lo curioso es saber AutoCAD y SolidWorks, pero prefiere a dibujarlos ya obtener la mayoría de mis ideas justo antes de irme a la cama (tengo lápiz y papel preparado debajo de la cama solo para eso: P).







")




")
