Paso 2: Diagrama circuito:
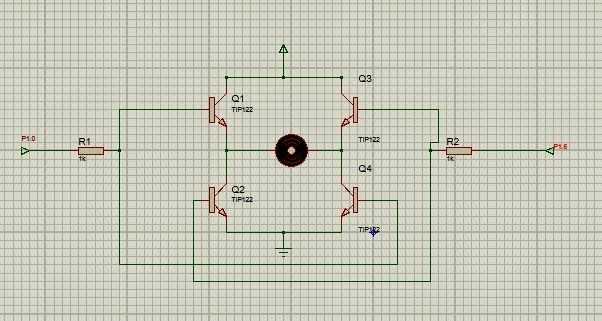
En este diagrama se puede ver que q1, q2, q3, q4 transistores. Cuando P1.0 es alta entonces el Transistor q1 y q2 en. el transistor q2 y q3 quedan en estado porque la P1.6 es baja. entonces la dirección del flujo corriente positiva del transistor q1 y el flujo a través del motor y consigue un motor otro extremo y flujo a través del transistor q4 luego a tierra. así que el motor gire en una dirección. Cuando P1.6 es alta y P1.0 baja entonces los transistores q2 y q3 en entonces el flujo de corriente a través del q2 y q3 para que la corriente opuesta a la anterior así que el motor gire dirección opuesta.
Si desea utilizar el código usado en este video para msp430 es abajo:
Este es el programa para este proyecto. utilizar software de energia
a programa msp430 launchpad
para descargar energia software haga clic en el siguiente enlace:
const int buttonPin = PUSH2; el número de pin pulsador
const int motorPin1 = P1_0;
const int motorPin2 = P1_6;
el número de los pines del LED
va a cambiar las variables:
int buttonState = 0; variable para lectura del estado del pulsador
void setup() {}
pinMode (motorPin1, salida);
pinMode (motorPin2, salida);
inicializar el perno pulsador como entrada:
pinMode (buttonPin, INPUT_PULLUP);
}
void loop() {}
leer el estado del pulsador valor:
buttonState = digitalRead(buttonPin);
comprobar si el pulsador está presionado.
Si es así, el buttonState es alta:
Si (buttonState == HIGH) {}
digitalWrite (motorPin1, HIGH);
digitalWrite (motorPin2, LOW);
}
Else {}
digitalWrite (motorPin1, LOW);
digitalWrite (motorPin2, HIGH);
}
}

.")











