Paso 9: La conexión electrónica





suena como una película... pero estoy divagando...
El objetivo, conectar: motores >> respectivos controladores de motor Easydriver >> Arduino >> ordenador.
Tengo el carro de la impresora, el escáner y el CD rom como la X, Y y Z, respectivamente.
1. la soldadura en los pernos que los controladores de fácil. (Sólo utiliza los 4 para el motor, 2 para alimentación y tres para arduino)
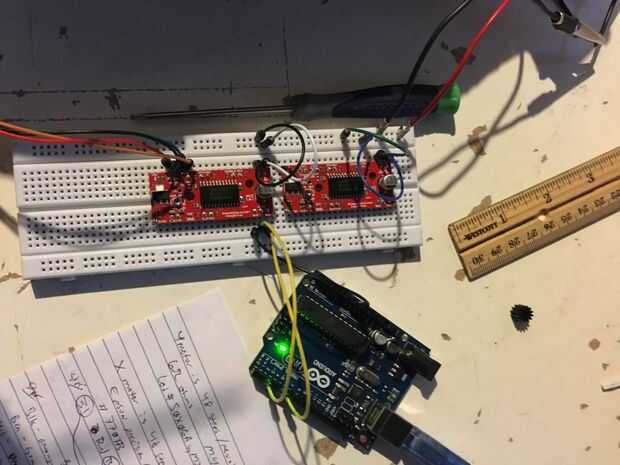
2. Inserte los conductores fácil en el tablero de lado a lado. (será apretado)
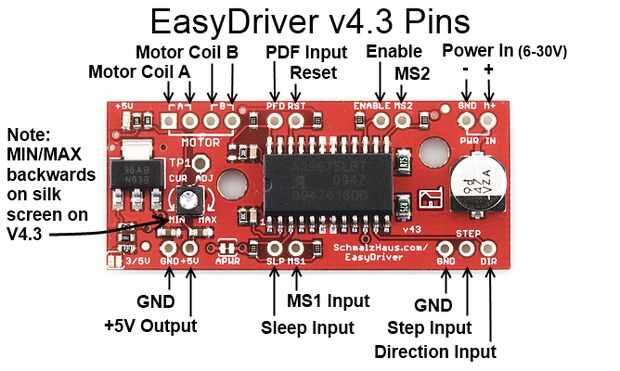
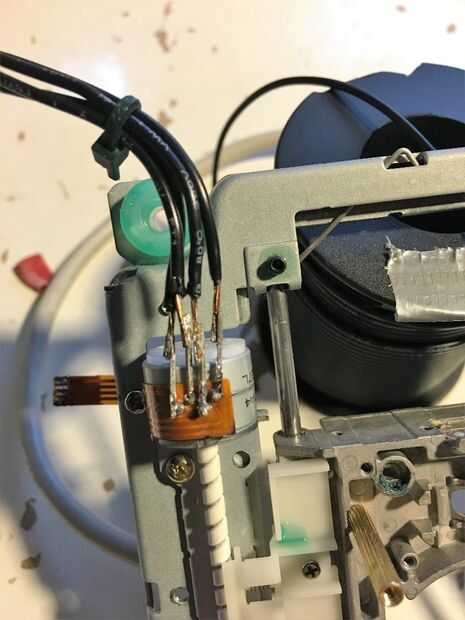
3. (Foto 1) conectar los motores a la A y B en los pines correspondientes de la placa (Recuerde, ellos siguen un camino vertical común en el tablero de pan!)
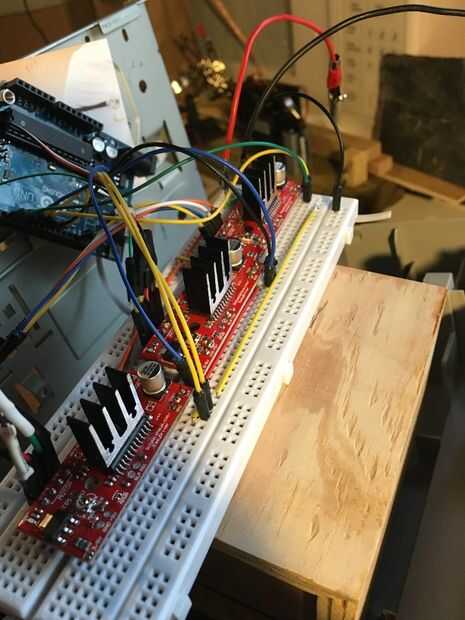
4. GRD M + son tierra y 5 voltios (12) y necesita estar conectado a la fuente de alimentación. Hice a un lado del pan Junta 5V y la de 12 voltios. Los dos comparten un terreno común. (Ver foto 3 para la potencia de CPU fuente de código de color de alambre)
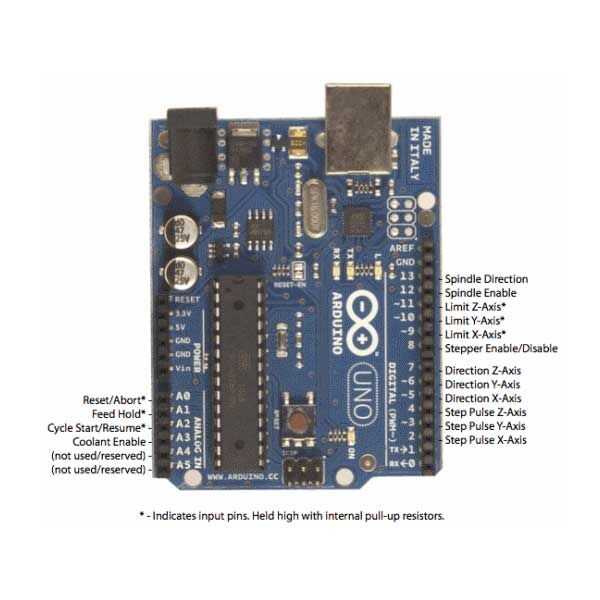
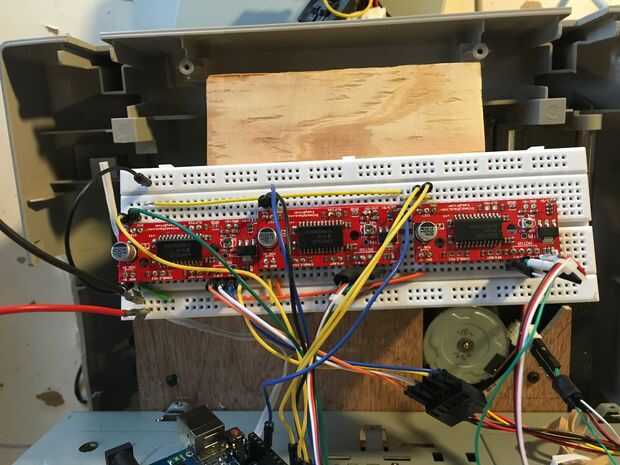
5. por último, el conductor fácil conecta con el Arduino a través de la parte inferior derecha de la tabla que en GND, paso y Dir. Los 3 ejes comparten una tierra en el protoboard así sólo un único cable común se conecta a la Arduino GND. Step y Dir para X, Y y Z son 2/5, 3/6/4/7 pasadores en el Arduino, respectivamente (Foto 2)
6. a continuación, conectar el arduino al ordenador mediante el USB.
7. Si está utilizando una fuente de alimentación de computadora como yo, usted debe saltar el cable verde a un cable de tierra (negro) (foto 4). Hacer esto con la energía desconectada!!! Saltar el verde y el negro le truco la fuente para pensar que está bien conectada como un independiente. Creo que utilizar cables 18AWG.
Nota: Digamos que el motor paso a paso no solo tiene 4 conexiones y tiene 5 o 6. ¿Cómo sabes que dos cables ¿compañero bobina A + y A - o B + y B -? Bueno mi paso a paso de impresora tiene 6 cables y esta desconcertado me. El camino a seguir es encontrar un repuesto de LED. Conecte dos cables de los LED y gire manualmente el motor. Si se enciende, es el par. ¿Ahora decir la primera y segunda de alambre luz vas a prueba uno y tres y se ilumina, también... ahora qué? Bien el más brillante de las dos combinaciones es lo que quieres. Luego hacer lo mismo con el resto de los conductores. Mi fue alambre de uno y dos y B cinco y seis. Me pareció que un cable de cinco los dos exteriores con frecuencia. (Foto 8)
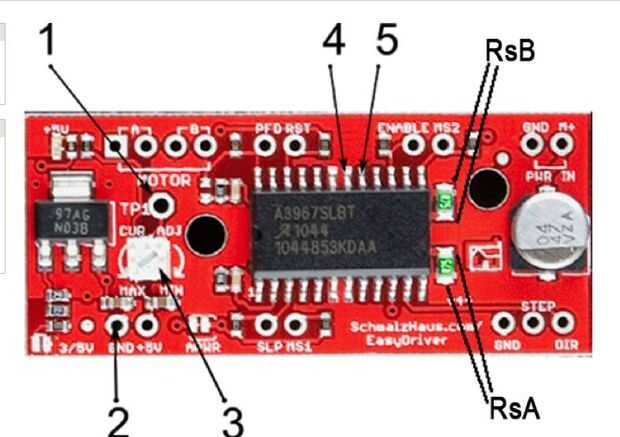
8. el easydriver tiene un potenciómetro en él (Foto 5) para ajustar la corriente que va al motor paso a paso y si usted puede encontrar las especificaciones para su específico paso a paso saber la corriente nominal se puede ajustar correctamente. Con un multímetro se encuentra la resistencia, Rs, en las patillas 4 y 5 del circuito integrado. Utilizar GND 5 + y TP1 para ver la tensión y ajuste el potenciómetro hasta obtener la tensión correcta para la corriente nominal de tu paso a paso. De esa manera tus motores no sobrecalentar y "scream". (Última pic y se muestra en vídeo)
La fórmula es Vref = 8(I/Rs)
Ejemplo: I = 0,2 amperios (parece como el común de los motores de CD ROMs, pero no me cita), Rs = 0,6 ohmios
Vref = [(0,2 Amps)(8)] /(0.6 Ohms) = 2,67 voltios. Sintonizar el bote a 2.67
No pude encontrar mis especificaciones para mis motores (sin embargo un común 0.2 amperios demostraron para arriba para el máximo actual de motores CD rom mientras leer la interweb) y muchacho el grito motor de escáner cuando primero conecté todo juntos tan solo disminuí el amperaje hasta que paró. Hasta ahora, bien. También he añadido algunos disipadores de calor al IC de la Easydrivers, aunque, por si acaso. No puede ser demasiado cuidadoso.
9. Fije sus disipadores de calor al IC en el controlador de fácil, si usted compró algunas y que puedan curar.
10. con todo conectado, encendido y arranque su computadora con regulador GRBL y abrir el puerto COM adecuado. Una lista de cosas como el $1 = 500.000 y todo eso debería aparecer. Podemos calibrar todo esto más adelante (¡ y debe!).
11. ajustar el paso en controlador GRBL (en la esquina inferior derecha) de 10 a 1, por si acaso.
12. correr cada uno de los ejes motores para asegurarse de que se mueven pulsando la flecha hacia arriba o hacia abajo (izquierda o derecha para el eje X).
13. Si se mueven, es impresionante y vaya al paso siguiente. Si no es así, compruebe sus conexiones o el pin en el Arduino (especialmente el CD rom ya que generalmente es un Tight fit).
Nota: Si mueven pero en la dirección equivocada, ir a herramientas > Opciones > y 'invertir' para el eje.
Como que se alude anteriormente, el CD rom me dio el dolor de cabeza más grande. Conexión y por que digo soldar, los cuatro cables para saltar a la protoboard es tan apretado que seguí recibiendo dos empalmes de la soldadura para fundir juntos con eficacia haciendo que los dos puntos a uno. Esto hace que el motor sea muy infeliz y cuando usted prueba con GRBL, sólo se agitan y no en el buen sentido. Vas a correr tu motor y sentirse muy frustrado que no funciona. Si usted quiere tomar en serio con soldadura o ya eres, haz un buen cheapy no soldador con una punta fina y algún flujo, especialmente si se trabaja con alambre de calibre pequeño. Pero cuando me di cuenta era todo era y que el motor realmente funcionara correctamente, muchacho hizo llegar un buen impulso de moral y un sentido de realización. Eventualmente soldar pernos hasta el final de mi hilo que conecté el motor que ayudó a así.











