Paso 2: Diseño del sistema de Control
Después de haber decidido sobre el tipo de buque, entonces necesita diseñar un sistema de control que cabría dentro del casco. También necesitaría construir el sistema para comprobar que el diseño funcione correctamente y sea confiable.
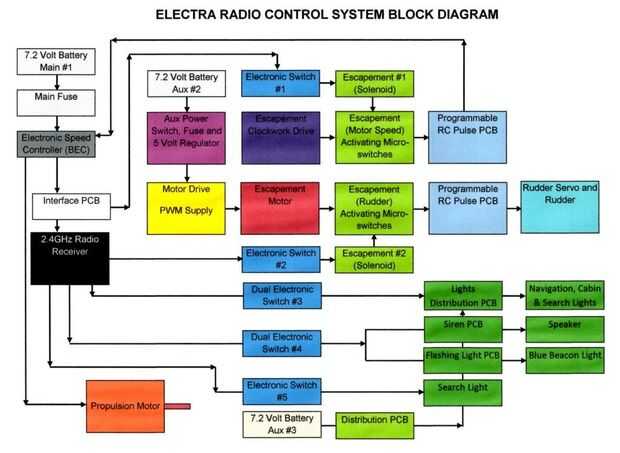
Los requisitos para el sistema de control fueron que debe para ser capaz de controlar el modelo por tanto proporcional r/c moderno y ser capaces de cambiar y utilizado como control de escape 'viejos'. Para lograr esto, el control final de cada escenario sería un servo para el timón y un variador electrónico (esc) para el motor. Cuando se utiliza el servo y la esc en una instalación moderna, ellos se conectaría directamente al receptor como de costumbre. Sin embargo, cuando se utilizaban bajo el control de escape, que necesitaba diseñar alguna forma de interfaz entre el escapements y el servo del timón y esc. Un diagrama de bloques del sistema propuesto se muestra en la foto 2. La intención es obviamente que el modelo podría ser funcionado en cualquier forma, sin desmontar el engranaje r/c y proporcionar una comparación directa de los dos métodos de operación.
En cuanto al diagrama de bloques de color, el sistema bajo control de escape trabajar como sigue:
Se suministra corriente a la esc (gris oscuro) de la batería principal #1, vía el fusible principal (gris claro). Sin embargo, el cable de señal no está conectado a la esc pero se desvía hacia el interruptor electrónico #1 (azul oscuro). Cuando este interruptor se activa el transmisor activa el solenoide de escape #1 (verde claro), liberando el brazo del escape que da vuelta a 90 grados, uno de dos micro interruptores de conmutación. Los micro interruptores están conectados a un programable RC pulso PCB (azul claro) que hace que el ancho de pulso modificar. La salida de este PCB está conectada a la salida provocando el esc para pasar de neutral a una determinado velocidad en una dirección de remite. Suelte el interruptor y el interruptor micro y escape #1 se liberan dando por resultado el pulso RC programable y la esc siendo a la posición neutral. Activar de nuevo el interruptor #1 (azul oscuro) y se activa el segundo interruptor micro causando la programable RC pulso PCB #1 (azul claro) alterar su ancho de pulso otra vez y cambiar la esc de neutral a una velocidad en sentido inverso. Suelte el interruptor y el escape #1 y el interruptor micro saldrá dando por resultado el pulso RC programable y la esc siendo a la posición neutral por segunda vez. Este proceso puede repetirse una y otra vez para controlar la velocidad del buque.
El otro escape funciona de manera similar de la misma, pero se activa el transmisor mediante el interruptor electrónico #2 (azul claro). Esto controla la operación de escape #2 que a su vez opera el servo por su PCB de pulso RC, sin embargo el escape no es mecanismo impulsado, pero utiliza un pequeño motor eléctrico (rojo) que es alimentado por la batería Aux #2 vía un regulador y un controlador de velocidad de modulación (PWM) de ancho de pulso.
Los interruptores electrónicos #3 y #4 son operados por el transmisor para el control de la iluminación, la sirena y luz intermitente azul.
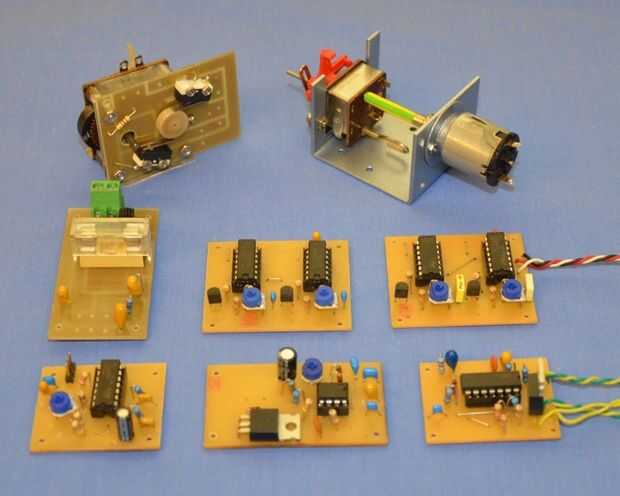
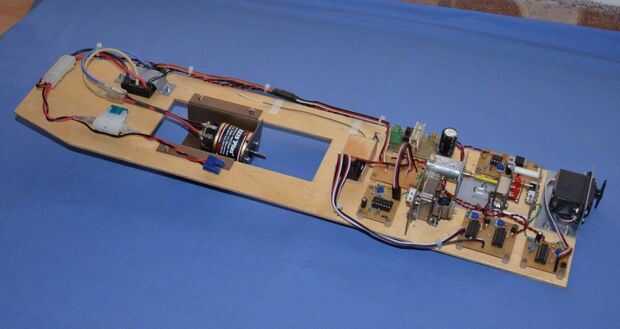
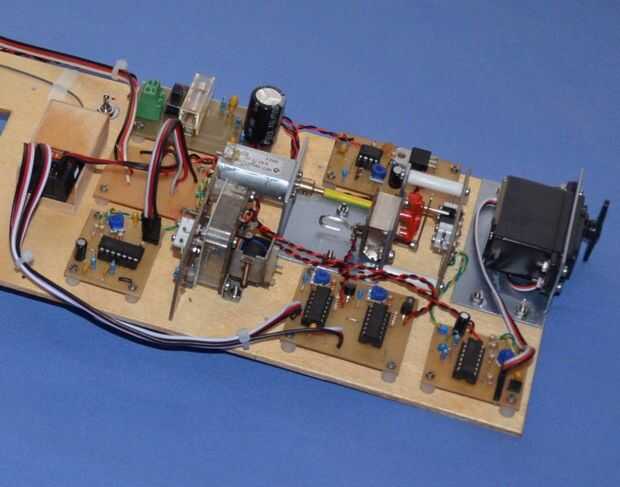
El siguiente paso fue construir todas las piezas necesarias como se describe y estos fueron debidamente cumplimentados, atado con alambre juntos en el Banco y aparte de uno o dos fallos menores, todos trabajaron correctamente – ¡ Hurra! La foto 3 muestra al individuo asambleas (un escape todavía no ha tenido su Junta microinterruptor montado) y Foto 4 es una vista de la Junta de montaje completo y artículos de r/c (que incluye el motor) y la foto 5 es un primer plano de toda la electrónica. Esta completada placa encaja directamente en el casco y sólo requiere la conexión del eje de la hélice de acoplamiento del motor y el brazo de la sierpe a ser totalmente operacional. Así, ahora construido y probado el sistema de control era tiempo para construir el modelo.













