Paso 7: Electrónica de eje Y
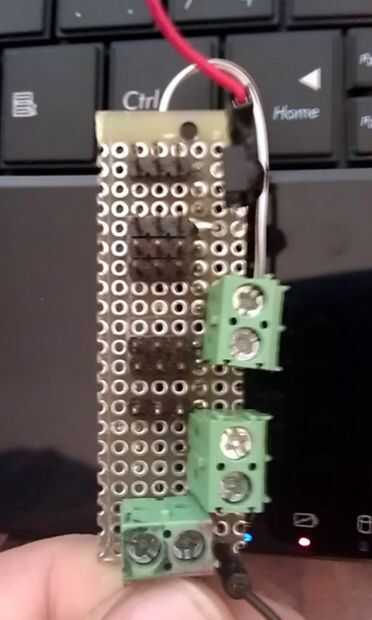
Esta Junta tuvo conectores para 3 motores servo (2 para el eje Y, 1 para Z). También contará con terminales de tornillo para alimentación. Además de los conectores tendrán un receptor IR, este es un componente especial que decodifica señales de infrarrojos de controles remotos de TV y luego les envía a arduino.
Aquí están las partes:
- Cortar un trozo de proto general de 1 x 3"
- Corte 3 pedazos de cabecera que son largos (estos se van a servos) 3 pines
- Cortar 4 pecies de encabezado que tiene solo un pin (estos irá a los pines de control en arduino y a tierra)
- Un terminal de tornillo terminal 2 (para energía)
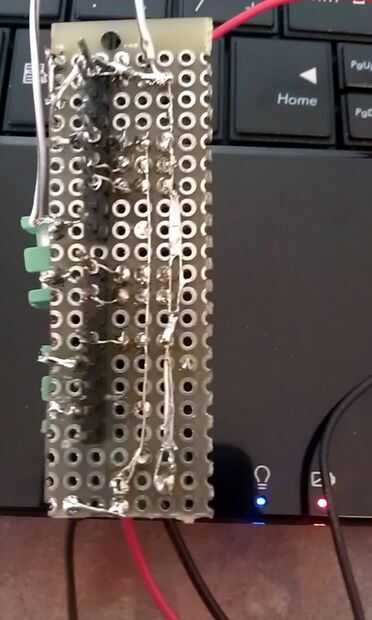
Ver el esquema de cableado. Aquí hay algunas cosas generales a saber:
- Tierra de Arduino conecta a negativo de batería
- Servos tienen 3 pines; energía, suelo y el control. Todos los motivos que se pueden conectar juntos y a la tierra del Arduino.
- Todos los pines de alimentación pueden conectarse a la terminal positiva de la batería. Cada pin de control va a un pin separado en la placa Arduino.
- El conector de decodificador IR tiene 3 pines; potencia, tierra y datos hacia fuera. Va al puerto de 5V de arduino. Tierra va a la tierra del Arduino. Y datos a su propio pin en el Arduino.
- Cuando los conectores de servo y el tornillo terminales están en la parte superior de la Junta. Las conexiones de pin solo salen de la parte inferior de la Junta Directiva y van a los pines de Arduino.
***
Aduino pernos utilizados:
D11 - receptor IR
D9 Servo Ya
D10 Servo Yb
D2 Servo Z
D6 Servo garra













