Paso 14: Conecte el circuito

Después de terminar la parte mecánica del brazo Dobot, debemos conectar el circuito de la parte de control Arduino.
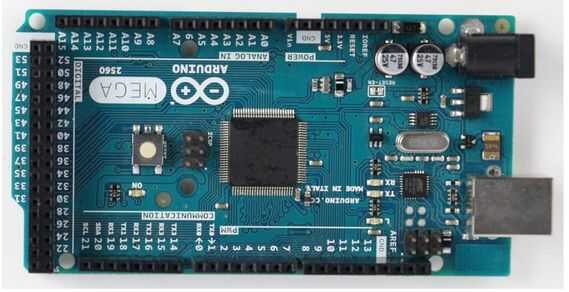
En primer lugar, conecte el blindaje Dobot a Arduino MEGA2560, como se muestra en la figura 1.
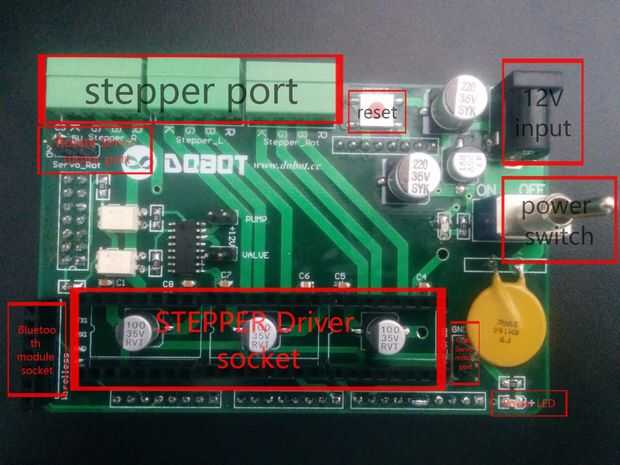
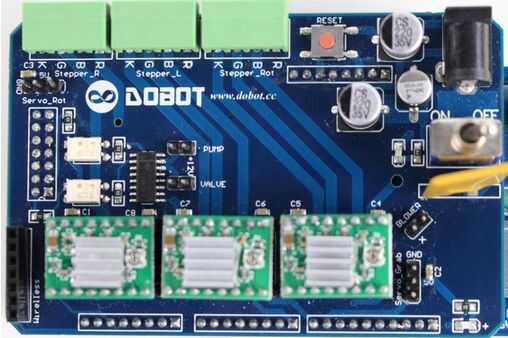
En segundo lugar, insertar la unidad de motor en las interfaces correspondientes como se muestra en la foto de arriba. Después de la inserción, obtendrá algo como en la imagen siguiente. Observe la dirección del mando, no introduzca reverso, de lo contrario se quemará después de un accionamiento.
En tercer lugar, inserte los terminales del motor paso a paso. Terminal de "Steppter_R" es para el motor de accionamiento del brazo grande, "Stepper_L" se conecta con el motor pequeño brazo y "Stepper_Rot" es para el giro del motor conectado al chasis. Serigrafía de tablero "RBGK" significa estar conectado con el motor "rojo, azul, verde, negro", respectivamente. NO posiciones del interruptor de las cuatro líneas como ha sido preconfiguradas en la fábrica.
En cuarto lugar, inserte el adaptador de corriente de 12V en el zócalo que se muestra en la imagen 1, ten en cuenta que usted necesita conectar el cable de alimentación a la terminal arriba del escudo, en lugar de la terminal de Arduino MEGA2560.













