Paso 28: Programa del CES

Programación de los medios de CES su configuración verious. En este paso vamos a los CES de programación.
El siguiente dispositivo que se conectará a la Naza M Lite es el módulo de potencia. Antes de hacerlo aunque realmente necesitamos potencia del módulo para la programación de los CES.
Sobre la programación de los CES
Antes de que conecte los CES para el controlador de vuelo, necesitamos programar el ESCs. Los CES de programación implica ajustar una serie de opciones relacionadas con el rendimiento de vuelo y sistema eléctrico. Para programar los CES, vamos a utilizar la tarjeta de programación ESC. ESC ajustes antes de llegar al proceso de programación del ESC, tomemos un momento para repasar las diferentes configuraciones que vamos a utilizar la tarjeta de programación ESC para configurar. Las opciones subrayadas son las que vamos a usar. Se discutirá cómo seleccionar estos ajustes en un momento. Por ahora, la tarjeta de programación ESC nos permite ajustar seis diferentes ESC parámetros:
Tipo de batería (Química de la batería): NiXX, LiXX, vida
El parámetro de química de la batería dice la ESC qué tipo de batería se utiliza para energía.
Voltaje: alto, medio, bajo
La cortada de ajuste de voltaje especifica en el punto de que, como la batería drena y empieza a salir menos voltaje, quadcopter cortará para evitar daños causados por una condición de baja tensión. Hay una tabla en la parte posterior de la tarjeta de programación ESC que demuestra lo que es la tensión de corte real para cada ajuste de corte de voltaje de cada batería química.
Tipo Cut Off: duro, lento
Cuando la batería se drena hasta el punto que alcanza el corte de tensión, esta configuración determina el comportamiento de los motores. El ajuste "duro" deja a los muertos de los motores. El "slow down" ajuste gradualmente reduce los motores, permitiendo que el quadcopter frenar su descenso.
Freno: off, medio, difícil
El ajuste del freno determina cómo se comportan los motores cuando el acelerador está en cero. Con el ajuste "off", los motores costa a una parada natural. Esta acción no requiere ninguna energía adicional y así aumenta la duración de la batería, pero en una situación de emergencia los apoyos todavía pueden girar después de que el acelerador se pone a cero hacia fuera. Con el ajuste "duro", los motores se paran inmediatamente cuando el acelerador está en cero. Esta configuración permite el quadcopter perder altitud más rápidamente y también puede ser muy útil en la prevención de daños en un accidente inminente, pero la energía adicional es necesaria para detener los motores, que reduce la duración de la batería. La posición "media" establece un equilibrio entre "off" y "duro".
Sincronización: auto, alta, baja
El ajuste del modo de sincronización es complejo, pero ajusta más o menos la velocidad con que el ESC se comunica con los motores. En general, motores con un mayor número de polos deben utilizar modos de sincronización más alta, y motores con menos postes deben utilizar modos de sincronización menor.
Puesta en marcha: alto, medio, bajo
El puesta en marcha ajuste determina cómo rápidamente los motores aceleran de estacionario durante despegue. Un entorno de "alta" significa el quadcopter va a bajar el suelo muy rápidamente. Un entorno de medios "medianos" o "bajos" el quadcopter va a bajar al suelo más lentamente.
Ajustes en la tarjeta de programación ESC
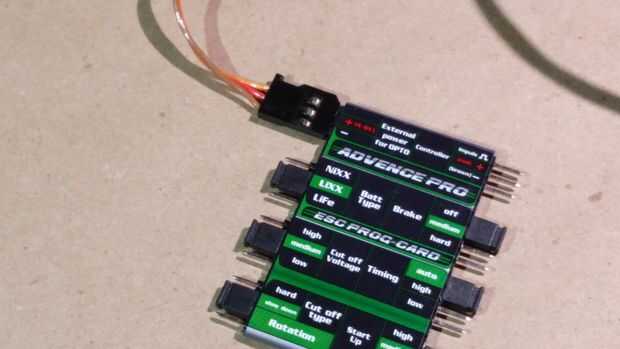
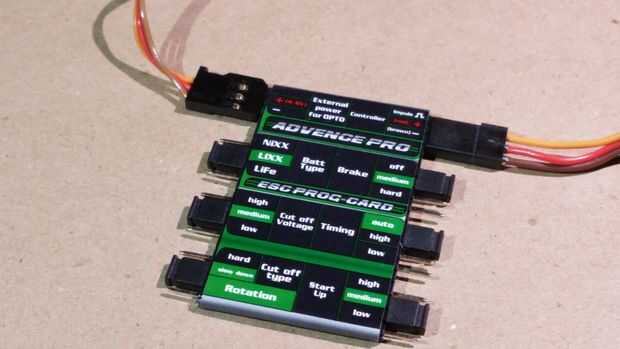
Si observas los lados de la tarjeta de programación ESC notará un montón de alfileres y seis puentes de 2 pines. La tarjeta de programación ESC tiene una etiqueta a cada lado, por un lado está la información sobre voltajes para químicos de baterías diferentes de corte y recomendados para diferentes tipos de motor. El otro lado es donde se encuentra la información importante. La muestra de la etiqueta que pines corresponden a los seis ajustes diferentes descritos anteriormente. Hay seis puentes de 2 pines que corresponden a los seis ajustes. Moviendo los puentes para que puente de diferentes conjuntos de pines, puede cambiar la configuración de la ESC programación tarjeta mover los puentes alrededor para que los ajustes se configuran de la siguiente manera (ver también la imagen):
Tipo de batería = LiXX
Voltaje = medio
Corte tipo = lento hacia abajo
Frenos = off
Tiempo = auto
Puesta en marcha = medio

Los CES de programación
Bien, vamos a realmente programar el ESCs. Necesitamos programar cada ESC individualmente tan sólo repetir el siguiente procedimiento para cada ESC.
Lo primero que debemos hacer es conectar el módulo de potencia en el tablero de distribución de energía así que puede recibir energía de la batería. Simplemente conecte el cable rojo del módulo de alimentación al wr rojo conexión soldado en la placa de distribución de energía. Luego conecte el cable negro también. En el lado de la tarjeta de programación ESC con todos los ajustes enumerados, en la esquina superior derecha encontrará un conjunto de tres pines de conexión etiquetados, "Controlador". Esto es donde se conecta la salida con el cable amarillo en la entrada en y el cable marrón en el - pin. En la esquina superior izquierda de la tarjeta de programación del ESC, enfrente de la conexión de salida, conecte el cable de salida desde el módulo de alimentación como se muestra en la etiqueta. El cable gris es negativo y el alambre de res es positivo. Ahora solo necesitamos aplicar energía al sistema para programar los CES. Simplemente conecte la batería en el conector XT60. Tenga en cuenta que incluso si tienes la batería cargada no debe todavía tiene un montón de energía. Las baterías LiPo se almacenan y se envía parcialmente cargadas porque esto amplía su vida útil.
Cuando se conecta a la batería, escuchará dos pitidos que indica que el ESC se ha programado con éxito. Si oír sólo un pitido y luego sigue sonando el ESC (técnicamente es los motores que hacen el pitido por cierto), desconecte la alimentación eléctrica, cambiar dos de los conductores del motor, vuelva a conectar la alimentación y vuelva a intentar el procedimiento de programación.










")

