Paso 44: Establecer ubicación de montaje del módulo del GPS
En este paso se establece la ubicación de montaje del módulo GPS.
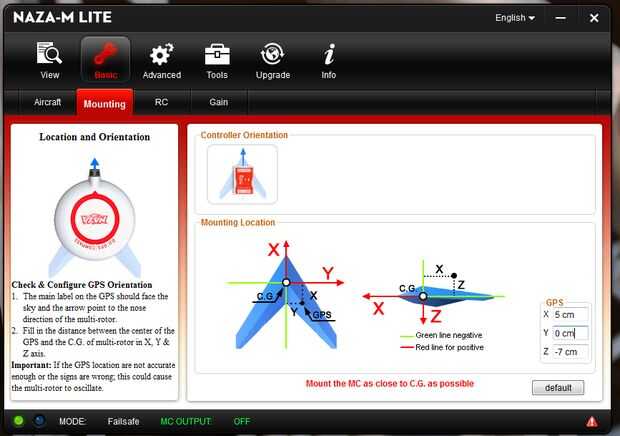
Ahora seleccione el siguiente sub-en el menú básico , la ficha de montaje . Esta página nos permite saber el controlador de vuelo donde el módulo GPS/brújula está montado en el bastidor. El Naza M Lite utiliza el sentido del módulo GPS/Brújula su posición y rumbo. Por lo tanto, es muy importante que el controlador de vuelo sabe donde el GPS se encuentra en el marco de los quadcopter. Por ejemplo, si el módulo GPS se montaron 5cm detrás del controlador de vuelo (es en la empresa Quanum), el controlador de vuelo puede averiguar la verdadera posición de lo quadcopter del GPS de la lectura mediante la adición de 5cm en la posición X.
En la esquina inferior izquierda de la pantalla, usted encontrará tres áreas de la entrada para configurar la posición del GPS, uno para la posición X, uno para la posición Y y uno para la posición de Z. El punto de origen de estos números es el centro del controlador de vuelo. Necesitamos hacer algunas mediciones simples para determinar qué números de entrada aquí.
Medir la posición del módulo GPS
Con el fin de averiguar la posición del módulo GPS en relación con el controlador de vuelo, necesitamos tomar algunas medidas. Creo que es difícil tomar las mediciones directamente en el controlador de vuelo porque hay un montón de cosas en el camino, así que vamos a hacer un dibujo simple de nuestro quadcopter para facilitar el proceso.
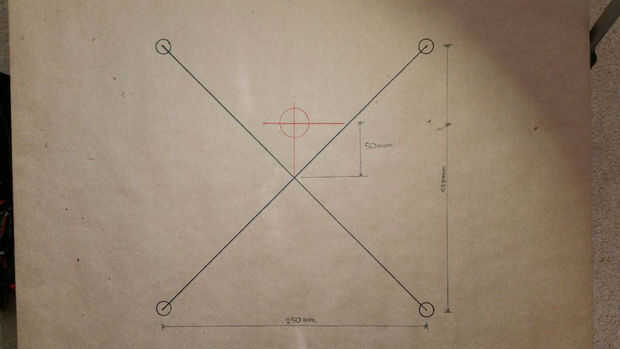
Así que primer lugar el quadcopter en alguna superficie en la que se puede dibujar. Yo simplemente difundir algún papel de embalaje marrón sobre una mesa para que yo pudiera dibujar con marcadores. Con el quadcopter en su superficie de dibujo, hacer un punto debajo de cada una de las cuatro patas. A continuación, busca en el lado de lo quadcopter, colocar un punto a cada lado del cuerpo de los quadcopter donde se encuentra el módulo GPS. El objetivo final es conectar estos dos puntos con una línea para calcular la posición X del módulo GPS.
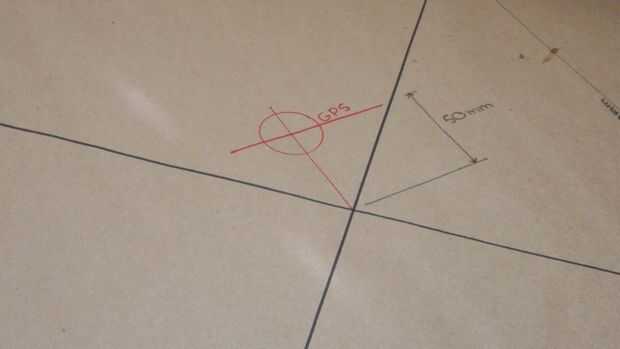
Con estos puntos en la superficie de dibujo, puede quitar el quadcopter y colóquelo a un lado por un momento. Usando un borde recto, conectar los puntos colocados bajo los pies de los quadcopter. Conectar los puntos en las esquinas de oposición para obtener una gran X sobre la superficie de dibuja. La intersección de estas dos líneas es el centro de lo quadcopter, que es donde está montado el controlador de vuelo. A continuación, conecte los dos puntos de hecho para marcar la posición del módulo GPS.
Ahora es el momento para medir. Utilizan unidades de centímetros, medida desde el centro de lo quadcopter a la línea de módulo GPS. Volver su computadora y entrada -5 cm en la primera casilla para definir la posición X del módulo GPS.
El próximo número, la posición Y, es muy fácil. El controlador de vuelo y el módulo GPS ambos sientan exactamente sobre la línea central de lo quadcopter. Por lo tanto tienen la misma posición Y. Entrada de cero en la segunda caja.
Finalmente tenemos que averiguar la posición de Z del módulo GPS. Terminé este medir muy cuidadosamente con un Verniers Digitales, no he podido averiguar de una manera más fácil de tomar esta medida. Para ahorrar un poco de problemas, la posición de Z del módulo GPS es 7 cm. -7 cm en el tercer cuadro de entrada en la base > montaje página.










")

