Paso 47: Calibrar los interruptores de modo de vuelo


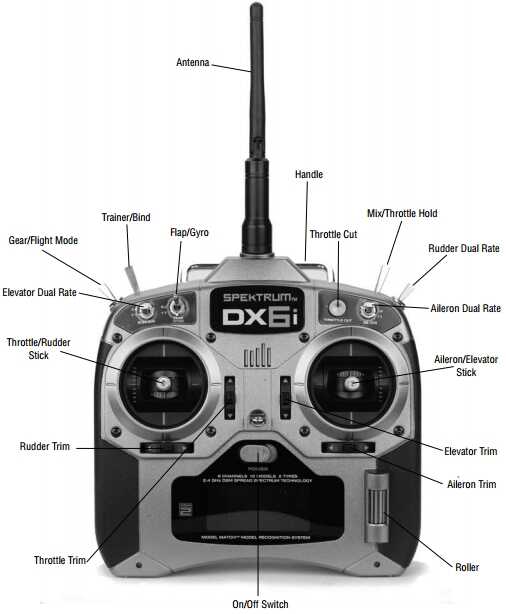
En este paso configuramos los DX6i interruptores para activar los modos de vuelo diferente en la Naza M Lite.
Este paso contiene lo que es por lejos la parte más confusa del proceso de calibración de todo vuelo radio control transmisor. Aquí está la situación: el Naza M Lite tiene cuatro modos de vuelo diferentes, tres de los cuales utilizaremos en este Instructable (actitud modo, GPS actitud y modo a prueba de fallos), el problema es, el canal que estamos utilizando para el control de los modos de vuelo (el canal de la U en la Naza M Lite) está conectado a un conmutador de dos posiciones. Así que estamos intentando utilizar un interruptor de dos posiciones para seleccionar entre tres modos de vuelo. ¿Cómo lo hacemos? ¿Cómo podemos conseguir tres opciones de un interruptor de dos posiciones?
Bueno, la respuesta es, no podemos seleccionar tres opciones diferentes con un interruptor de dos posiciones con el hardware solamente. Sin embargo, podemos hacer uso del software transmisor para resolver este problema utilizando una combinación de características: mezcla programable, ajuste del recorrido y sub trim. Estar prevenido, mezcla programable es complicado y difícil de entender. Prueba simplemente haciendo una búsqueda en Google para las explicaciones de cómo radio transmisor Canal mezcla obras puedo casi garantizar le será bastante confuso. Configuración de los interruptores de la DX6i u otros transmisores que carecen de interruptores de tres posiciones es en gran medida la parte más conceptualmente difícil de usar el Naza M Lite. Las otras características de viajes, ajuste y sub trim son, afortunadamente, mucho más fáciles de entender.
No se dejen intimidar aunque los ajustes no son realmente tan confusos. Comencemos por examinar la situación con la configuración por defecto de la DX6i. Recuerde que el interruptor de velocidad (tope izquierdo) está conectado al canal U en el controlador de vuelo para que el interruptor de velocidad se utilizará para seleccionar el modo.
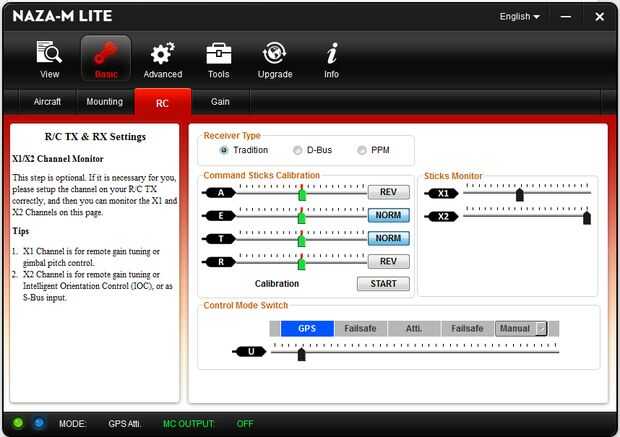
Abrir el básico > RC ajustes en el software del asistente de DJI y observar lo que sucede cuando usted tapa el interruptor hacia adelante y hacia atrás. Te darás cuenta que con el interruptor en la posición 0 el chevron de modo de vuelo estará por debajo de la parte inferior de la barra y el controlador de vuelo estará en modo a prueba de fallos. El interruptor y el galón irá a la segunda área a prueba de fallos. Por lo tanto, no importa cómo le da la vuelta el interruptor, el controlador de vuelo siempre será en modo a prueba de fallos. Esto no es bueno porque si el controlador de vuelo está siempre en modo a prueba de fallos, nunca se levante del suelo.
Lo que está sucediendo aquí es que el rango entre los valores máximo y mínimos del engranaje del interruptor es demasiado amplia. En el software del asistente de DJI, echa un vistazo a la distancia entre la zona GPS y el Atti. área; es un poco más estrecho que el rango entre los valores mínimos y máximos del interruptor GEAR. Así, el primer paso en la fabricación de la selección de modo de vuelo trabajo es reducir el rango entre los valores mínimos y máximos del interruptor GEAR.
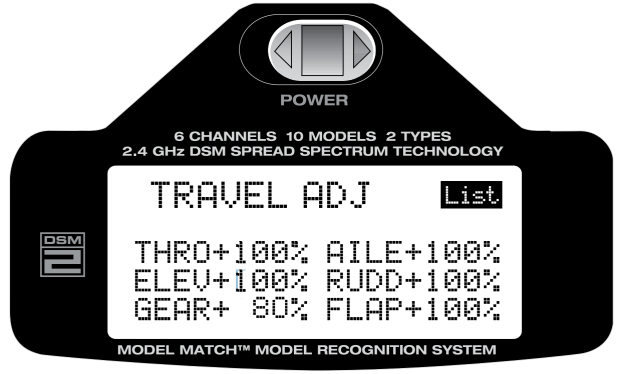
Esto lo haremos mediante la función Travel Adjust. Ajustar el recorrido de la función nos permite cambiar el rango entre los valores máximos y mínimos de un control. Eso es exactamente lo que queremos hacer aquí! Para comenzar con, asegúrese de girar el interruptor de velocidad hacia abajo (0). Ahora, toma un poco de experimentación figura números viables, pero en la pantalla de ajuste de recorrido del transmisor, reducir el ajuste de engranajes al 80%. Ahora regresa en el software del asistente de DJI y tratar de mover el interruptor de marcha hacia adelante y hacia atrás otra vez.
Usted notará que el chevron no se mueve hasta este momento. De hecho, viaja 20% menos distancia que antes. Casi parece que la distancia entre los valores máximos y mínimos coincide con la distancia entre la zona GPS y el Atti. ¿zona, correcto? Pero tenemos otro problema, la chevron se debe ahora bancos entre las dos zonas a prueba de fallos. Lo que tenemos que hacer ahora es pasar toda la gama sólo para que coincida con el GPS y Atti. áreas. Bien usaremos otra característica para lograr esto, la función de Sub Trim.
Sub trim se utiliza básicamente para cortar literalmente el de la parte inferior del control gama, o puede usarse para añadir algunos a la parte inferior de la gama del control. Se puede pensar la función Sub Tim como una manera de mover toda la gama de entradas de control hacia arriba o hacia abajo. Imagino que esto es exactamente lo que queremos hacer de nuevo! Así, el segundo paso en la fabricación de la selección de modo de vuelo trabajo es reducir el nivel de acabado de sub del interruptor GEAR.
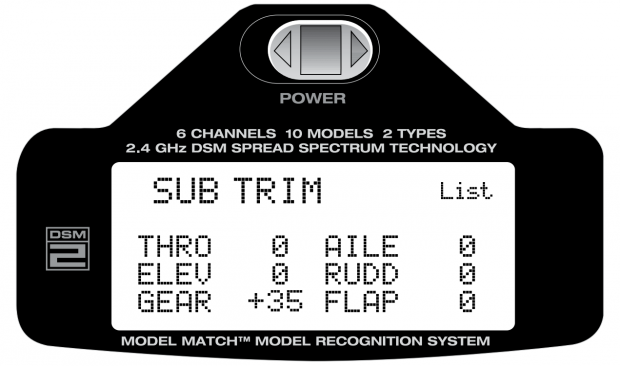
Así que ir al menú de la DX6i otra vez y seleccionar SUB TRIM. Estamos interesados en el sub para el interruptor del mecanismo de ajuste. Una vez más, el ajuste correcto se determina por experimentación, pero aquí usted puede ver fácilmente cómo nosotros averiguar qué valores utilizar. Mantenga sus ojos en el software del asistente de DJI mientras que disminuye el nivel de acabado del sub para el interruptor de velocidad (estamos reduciendo el valor porque queremos que toda la gama de la que moverse a la izquierda). Usted notara la chevron a la izquierda! Si le da la vuelta el interruptor notará que ambos extremos de la gama de control son móviles. Establecer el nivel de sub trim ↓ 35.
Ahora si le da la vuelta el interruptor de marcha, debe cambiar el galón entre el GPS y Atti. posiciones. Enhorabuena, tienes apenas manejadas para hacer lo que muchos pilotos tienen grandes difíciles de lograr.
Pero no hemos terminado bastante aún porque hay un tercer modo de control de vuelo que queremos la capacidad de activar, modo a prueba de fallos. ¿Por qué queremos activar manualmente el modo a prueba de fallos que pregunte? Bueno, como aprenderás más en el siguiente paso, podemos programar el controlador de vuelo para hacer algo muy padre cuando entra en modo a prueba de fallos. Ya que la Naza M Lite está equipado con un módulo GPS, cuando entra en modo a prueba de fallos automáticamente puede volar de vuelta a donde despegó y aterrizar en sus pies. Normalmente se utiliza el modo a prueba de fallos Si el controlador de vuelo pierde el contacto con el transmisor de radio. Modos de fallos permite el quadcopter volar con seguridad a su posición inicial cuando pierde una señal de radio, en lugar de estrellarse justo que es lo que harían muchos otros quadcopters.
Aquí está la situación discutida al principio de este paso, cómo obtenemos nuestro interruptor de dos posiciones para activar una tercera opción. Bueno, vamos a utilizar sin embargo, otra característica de la DX6i llamado mezcla programable (normalmente como mezcla, o incluso mezclar). Mezcla básicamente nos permite cambiar dos controles manipular solamente un interruptor o stick en el transmisor. Mezcla programable se utiliza para todo tipo de cosas. Un uso común es para aumentar la aceleración de un quadcopter cuando se mueve hacia adelante compensar una pérdida de empuje hacia abajo. Verás, cuando un quadcopter es nivel, todo su empuje se dirige hacia abajo, sosteniendo el quadcopter en el aire. Sin embargo, cuando haces el quadcopter avanzar, algunos del empuje se dirige hacia los lados, dejando menos hacia abajo, para que el quadcopter perderá altura. Usted podría utilizar mezcla programable para decir, "cuando empuja hacia delante el stick del elevador, aumenta automáticamente el acelerador en un 5%" por lo que en esta situación sería controlar el elevador y acelerador con el movimiento de un palo. Es lo que mezcla programable.
¿Cómo nos ayudan hacer nuestro interruptor de selección de un tercer vuelo modo? Bueno, vamos a hacer algo un poco interesante con nuestra mezcla programable. Por cierto, este es uno de los conceptos más confusos en todo pilotaje quadcopter, así que Tómese su tiempo y leer aunque este párrafo un par de veces si es necesario. Se mezcla el interruptor GEAR con sí mismo. Lo que esto dice que el transmisor de radio es "cuando se tapa el interruptor de marcha hacia abajo, aumentar el interruptor de velocidad en un 50%". Puedes ver que esto es muy similar a la situación anterior con la mezcla elevador/acelerador. Todavía estamos utilizando un control de entrada que afectan a la producción de otro control de entrada, pero en este caso las entradas de control son el mismo (vea por qué esto es confuso). La parte más importante de esta técnica es que podremos usar otro interruptor, en nuestro caso el interruptor de la aleta, para activar y desactivar esta mezcla.
Así, cuando el interruptor de la tapa está en el 0 posición (arriba), entonces la mezcla programable será apagada y el interruptor de velocidad funcionará exactamente igual que antes cuando solo configuramos el recorrido ajustar y sub trim características. Interruptor con la aleta en 0 y la mezcla que se apaga, el interruptor de velocidad moverá de un tirón entre el modo de GPS y actitud como normal. Sin embargo, cuando el interruptor FLAP en la 1 posición, se activará la mezcla. Con la mezcla habilitada, cuando el interruptor del engranaje está en la 1 posición, modo de actitud todavía se selecciona porque la mezcla no afecta el valor máximo del control. Sin embargo, cuando el interruptor de la tapa esté en la 1 posición y la mezcla está habilitada, cuando se nos tapa el interruptor de velocidad en la posición 0, la mezcla programable aumentará el valor de cambios en un 50%, que dará inicio el valor por debajo de la parte inferior de la gama y el gatillo a prueba de fallos. Por lo tanto, en Resumen, el tercer paso en la fabricación del vuelo el trabajo de selección de modo vuelo controlador configura una mezcla programable que empuja el valor de engranaje a la posición a prueba de fallos.
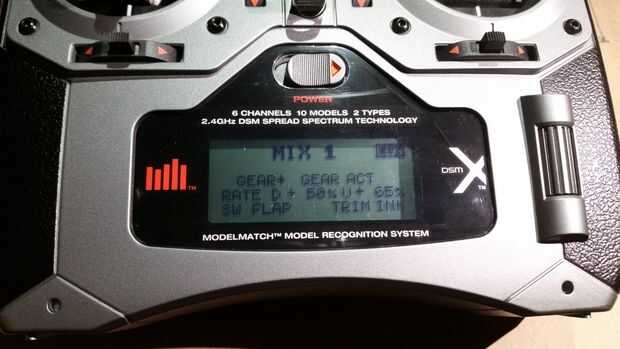
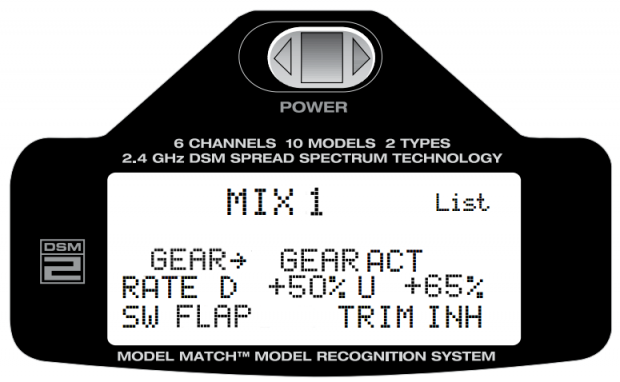
Vamos a conseguir miró fijamente cómo configurar nuestra combinación programable. La DX6i realmente puede programarse con dos mezclas, pero sólo necesitamos uno para hoy, así que en el menú principal, seleccione Mezclar 1. Inicialmente sólo verá una cosa en la pantalla, un acrónimo leyendo "Hab." Cambio y haga clic en este valor en "Acto" y verá todos los ajustes de mezcla aparecen. Configurar las opciones de acuerdo a la figura de abajo. Hay tres ajustes importantes aquí. En primer lugar, la primera línea de la configuración de las listas el swtich amo y el esclavo. La mezcla funciona cambiando el valor de la mezcla de esclavos cuando el amo mezcla cambios. En este caso, como hemos comentado anteriormente, el esclavo y el amo son el mismo interruptor para que el interruptor de marcha básicamente va a cambiar su propio valor. En segundo lugar, la opción D tasa determina cuánto para cambiar el valor cuando el interruptor está en la posición hacia abajo. Este es otro ejemplo del valor determinado a través de la experimentación, pero un valor del 50% funciona bien aquí. Último tenemos el campo SW. Esta configuración determina el conmutador se usa para encender y apagar la mezcla. Puede utilizar cualquiera de los switches en la DX6i, pero se utilizará el interruptor FLAP.
Vamos a volver al software del asistente de DJI. Ahora podemos seleccionar tres modos de vuelo diferentes, usando una combinación de lo engranajes y el interruptor la aleta. Nuestra selección de modo de vuelo trabajará con los siguientes patrones:
| Aleta Posición del interruptor | GEAR Posición del interruptor | modo de vuelo |
|---|---|---|
| 0 (arriba) | 0 (abajo) | Actitud GPS |
| 1 (abajo) | 0 (abajo) | A prueba de fallos |
| 0 (arriba) | 1 (arriba) | Actitud |
| 1 (abajo) | 1 (arriba) | Actitud |
Enhorabuena, tenemos algunos trabajo aún por hacer antes de que termine el quadcopter, pero haciendo el NAZA M Lite obra de modos de vuelo con la DX6i es algo muchos pilotos quadcopter tienen gran dificultad lograr. Después de este paso largo y confuso, podemos Costa ahora más o menos a la terminación de este proyecto.










")

