Paso 48: Configurar el modo a prueba de fallos
En este paso nos fijará el comportamiento a prueba de fallos para la Naza M Lite.
Después de ese último paso, usted será feliz de saber que este paso es bastante más sencillo. En este paso se establece la acción que deseamos la Naza M Lite para tomar cuando se entra en modo a prueba de fallos.
¿Qué es el modo a prueba de fallos?
Con la mayoría de los controladores de vuelo, si el transmisor y el receptor pierden su conexión, el quadcopter simplemente apague y caen del cielo. No hace falta decirlo, esto no es una situación ideal porque obviamente podría resultar en un daño significativo a su quadcopter. Modo a prueba de fallos es una característica muy útil de la Naza M Lite que aprovecha las capacidades GPS del controlador de vuelo. En lugar de simplemente cae al suelo, a prueba de fallos modo permitirá nuestro quadcopter Quanum riesgo a descender de forma controlada y segura.
El Naza M Lite puede entrar en modo a prueba de fallos en dos circunstancias. En primer lugar, por supuesto, la Naza M Lite entrará a prueba de fallos modo es si el transmisor y el receptor pierden su conexión. En segundo lugar, podemos ajustar manualmente el controlador de vuelo de Naza M Lite a modo a prueba de fallos con el transmisor; Esto es lo que hemos trabajado tan duro en el paso anterior para configurar. Con el controlador de vuelo en el modo de GPS, podemos girar el interruptor de la tapa para poner el controlador de vuelo en el modo a prueba de fallos. Vamos a discutir en un segundo por qué queremos ser capaces de establecer manualmente el Naza M Lite a modo a prueba de fallos.
Comportamientos de modo a prueba de fallos
Hay dos comportamientos diferentes que podemos configurar la Naza M Lite para tomar cuando se entra en modo a prueba de fallos en cualquiera de las circunstancias descritas anteriormente. Todo comienza cuando la elevación de lo quadcopter. Cuando el quadcopter primero asciende de la tierra, la Naza M Lite conversará con el módulo GPS/brújula para guardar la posición de lanzamiento. Se guardan la posición de despegue horizontal y la altitud de la posición de despegue; esta posición se llama "casa". El comportamiento más simple es "aterrizaje". Con el comportamiento de aterrizaje, como usted puede probablemente adivinar desde el nombre, la Naza M Lite ejecutará un aterrizaje controlado cuando el controlador de vuelo entra en modo a prueba de fallos. El controlador de vuelo inicialmente asomará el quadcopter durante 10 segundos para permitir un tiempo para la conexión entre el transmisor y el receptor de radio para ser restablecido o para el piloto salir manualmente del modo a prueba de fallos. Después del retardo de diez segundos, la Naza M Lite utilizará datos desde el módulo GPS a suavemente el quadcopter (esperemos) de la tierra.
El segundo comportamiento a prueba de fallos es un poco más complejo, pero realmente, realmente genial. En lugar de simplemente descendente recto hasta el suelo y el aterrizaje, el Naza M Lite puede volar autónomamente el quadcopter a la posición de lanzamiento y luego suavemente la tierra a sus pies, este es el comportamiento de "Volver a casa" (RTH). Se trata de una fantástica capacidad ya que no sólo ayuda a garantizar que su quadcopter es destruido en caso de que se pierde la comunicación por radio, pero también significa que el quadcopter no se pierde. Como con el comportamiento de aterrizaje, la maniobra RTH comienza con un retraso de 10 segundos. Entonces, el quadcopter subirá a una altitud de 20 metros si no está ya por encima de esa altitud cuando el Naza M Lite entra en modo a prueba de fallos. Esto se hace para minimizar la posibilidad de lo quadcopter estrellándose en un árbol o algo en su camino de regreso, que podría suceder si el quadcopter simplemente voló hacia atrás a la posición de despegue a baja altura. Una vez que el quadcopter es flotando directamente sobre la posición inicial, lentamente desciende a la tierra y las tierras de la misma manera que con el comportamiento de aterrizaje.
Configurar el modo a prueba de fallos
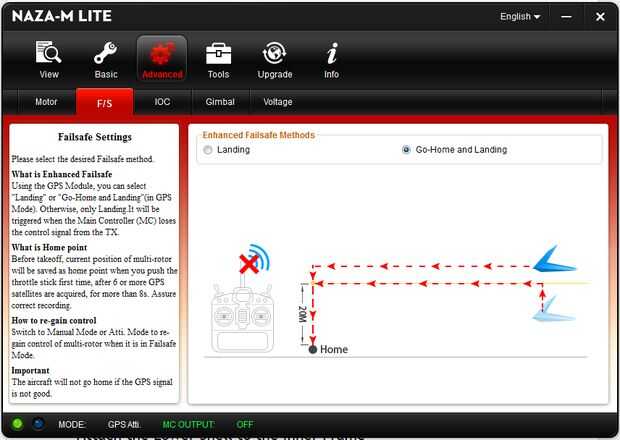
Ahora que entiendes el modo a prueba de fallos, vamos a configurarlo. El proceso es sencillo. En primer lugar, seleccione la ficha avanzado en la parte superior de la pantalla. A continuación, seleccione la sub-ficha F/S. Verá dos botones, uno para cada uno de los comportamientos de a prueba de fallos descritos anteriormente. Aterrizaje de modo significa el quadcopter flotar durante 10 segundo y luego la tierra. Significa modo de go-home y aterrizaje el quadcopter asomará durante 10 segundos, ascender a una altitud de 20 m, volar a la posición de inicio y luego la tierra. Puedes elegir cualquiera de estas opciones, pero generalmente seleccionar Go home y aterrizaje ya que es un poco más útil y yo no quiero cazar mi quadcopter si nunca pierdo la señal de radio (que no tengo).
También, el modo de Go-home y aterrizaje es realmente agradable para el vuelo FPV. Cuando usted está volando con FPV puede ser fácil perder la pista de donde se encuentra exactamente el quadcopter. Aunque no deberán volar fuera de contacto de línea de vista con el quadcopter, incluso al volar con el FPV, el quadcopter es todavía un pequeño objeto volando alrededor en el cielo. Si están volando FPV y quiero traer el quadcopter de vuelta a casa sin demasiado esfuerzo, pueden llevar el interruptor de la aleta para forzar el Naza M Lite en modo a prueba de fallos. El quadcopter luego volará hacia atrás y aterrizar en sus pies. También es una buena manera de impresionar a los espectadores.










")

