Paso 11: Configurar modos de vuelo y transmisor








El código de Arducopter apoya mucho de modo de vuelo diferentes, algún manual, algunas automáticas, algunas con ayuda de GPS. Recuerde, si usted quiere utilizar los modos de GPS asistido, tienes que esperar a que el módulo GPS adquiere posición 3D bloqueo, señalado por el LED azul en el APM y su módulo de LED ir color azul. No trate de volar en modos dependientes de GPS si no tienes un bloqueo GPS, la nave se comportará erráticamente o no volar en todos. Estos modos son muy importantes para estudiar, aprender y comprender. Usted puede aprender todo acerca de los modos de vuelo no Arducopter web. Normalmente utilizo 6 modos de vuelo, que he configurado en mi emisora Radiolink AT9 con la ayuda de la combinación de 2 interruptores, un interruptor de 3 posiciones y un interruptor de 2 posiciones. Aquí en breve describiré mi preferido modos y cómo configurarlos de vuelo:
- Estabilice - es el modo más común para los aviadores de drone, es un modo totalmente manual, el controlador de vuelo mantiene el nivel de zumbido, pero usted tiene el control total del movimiento del acelerador, la rotación y el delantero-detrás-izquierda-derecha. Esto también es el modo más difícil de volar como un novato, pero te da más control sobre su arte.
- Posición Hold (P.Hold) - este es un modo de vuelo asistido GPS, tiene completo control del acelerador y dirección, pero el zumbido mantiene una constante situación, rumbo y altitud. Es generalmente popular porque el piloto palillo directamente entradas control de ángulo de inclinación del vehículo proporcionando una sensación más "natural".
- Volver a lanzar (RTL) - también de GPS asistido, cuando se selecciona modo RTL, el helicóptero vuelve a la ubicación de inicio. El helicóptero subirá primero a RTL_ALT antes de volver Inicio o mantener la altitud actual si la altitud actual es superior a RTL_ALT. El valor predeterminado de RTL_ALT es el 15m. Muy útiles cuando se termina una sesión de vuela, ayuda a traer tu casero rápido y al punto donde fue abetos armados drone. Los aviones no tripulados
- Hover (AltHold) - con el modo de espera de altitud, el acelerador se controla automáticamente para mantener la altitud actual. Roll, Pitch y yaw funcionan igual que en modo estabilice lo que significa que el piloto controla directamente el rollo y diferentes ángulos de inclinación y la dirección.
- Auto - en el modo automático el drone seguirá una secuencia de comandos de misión previamente programada en el piloto automático que se compone de los comandos "do" (es decir, comandos que no afecten a la situación del helicóptero como accionar el obturador de una cámara) y comandos de navegación (es decir, puntos de referencia).
- Tierra - muy simple, si se activa este modo, el controlador de vuelo tratará directamente a derribar los aviones no tripulados y de la tierra en su posición actual si usted tiene un bloqueo GPS.
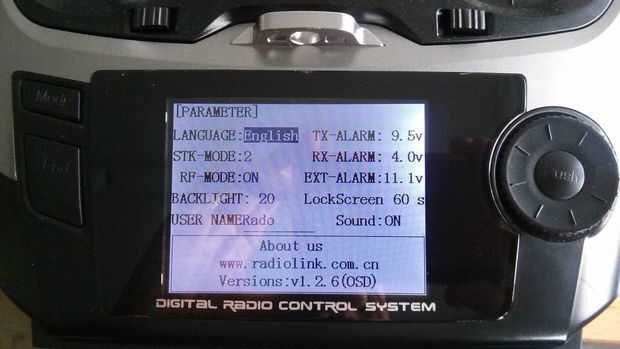
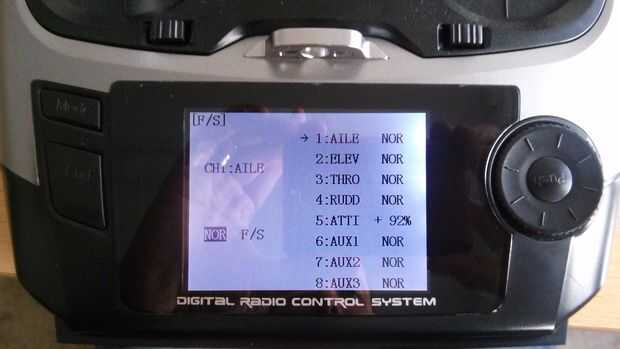
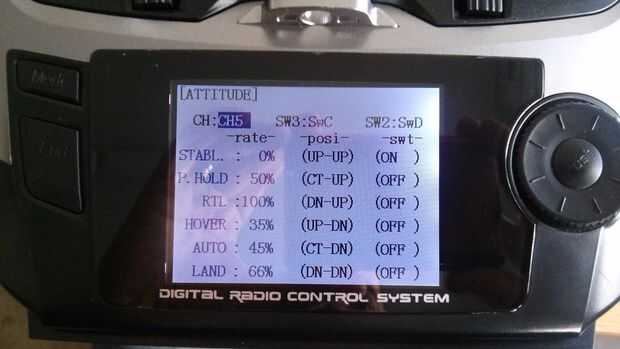
Así que estos son mis modos de vuelo preferido, puede elegir cualquier modo que quiera, pero si quieres la misma configuración que tengo, sólo tiene que conectar a planificador de misión, en la página de Configuración/Tuning seleccione Modos de vuelo y configuración de modos individuales según la primera imagen. Ahora necesita configurar los conmutadores de transmisores de radioenlace. Así que para ayudarle, he tomado una foto de cada pantalla relevante en mi transmisor, lea el manual y cambiar los valores según los valores en mis fotos. Lo más importante es la última foto, que muestra la mezcla de dos interruptores SwC y SwD en la pantalla de la actitud . Los que están en la esquina superior derecha de su transmisor señalada con las letras C y D. Solo sigan mi ejemplo y debería estar bien.
Una cosa importante es, al menos en mi unidad, el canal de acelerador se invirtió desde el principio, por lo que era el acelerador a fondo con el palo de abajo y en ninguna válvula reguladora con el palillo en la posición superior. Si este es su caso, usted necesitará ir a la pantalla de reversa y cambie el valor de 3:THRO REV. Ahora debe estar correcto.






")






