Paso 6: Montaje del controlador de vuelo APM

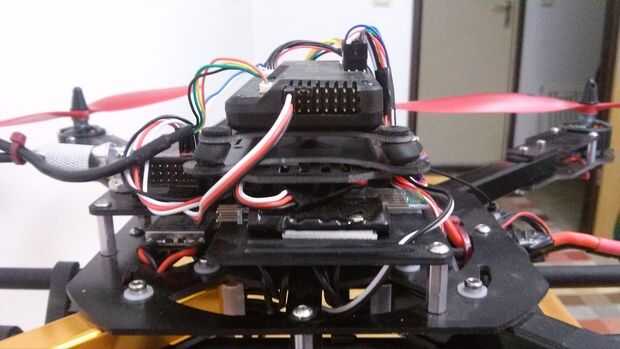





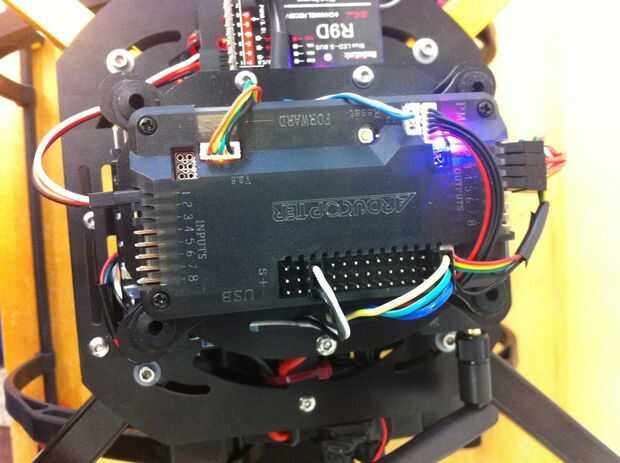
OK, ahora es el momento de instalar el nivel más superior de la estructura, donde será el controlador de vuelo. Es tan simple como atornillar en los últimos tres restantes pilares, con una gota de pegamento de tornillo. Ahora viene la plataforma anti-anti-vibración/amortiguación, asegurada en su lugar con cinta de doble cara. Elimina las vibraciones de los motores y hélices para no influir en el controlador de vuelo. Lo hacen bonito centro. Usted desea que el controlador de vuelo en el centro absoluto de los aviones no tripulados, es bueno para la estabilidad de vuelo, debido a la internas acelerómetros y giroscopios en el controlador de vuelo. Se puede ver claramente en que él fotos de cómo he instalado el APM sobre la plataforma de amortiguación. No te preocupes por la orientación de la APM, sin embargo, usted puede ver que lo instalé 90 grados a la izquierda contra el frente del marco, donde el soporte del GPS es. Puede establecer la orientación real en planificador de misión. Asegure el APM en su lugar con cinta adhesiva y otra vez, tratar de centrar. Más información sobre este tema aquí.
Ahora todos los cables. Yo necesita guiar a cada cable de nivel inferior a la plataforma superior, a través de las aberturas en la plataforma superior y en el puerto correspondiente en la APM. En primer lugar, instale el módulo GPS en el soporte. He utilizado cinta, simplemente debe asegurarse que la flecha en el módulo GPS está apuntando hacia delante, es la orientación de la brújula, y es necesario que el controlador de vuelo poder determinar la orientación y dirección correcta. Hay 2 conectores desde el módulo GPS, uno es un perno 4 I2C para el compás y el otro es un GPS que va en el orificio superior de GPS en el APM de 5 pines. En mi caso, el módulo GPS estaba equipado con un conector de 6 pines para el controlador de PixHawk, tuve que cambiar por un conector de 5 pines. Utilizar una brida para asegurar el cable al soporte. Si el cable es demasiado corto, deberás cortar un trozo del soporte GPS con una herramienta Dremel, para que no tire de la APM cuando se pliega hacia abajo. Usted puede leer más acerca de este tema aquí.
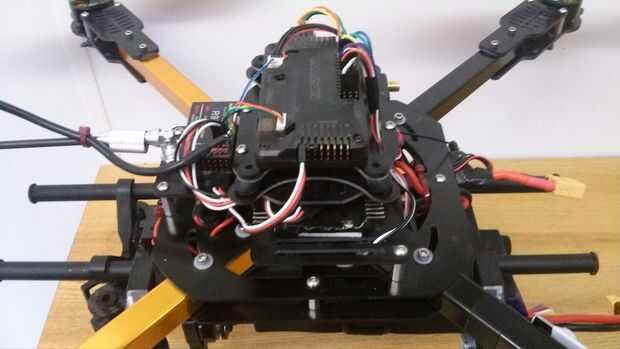
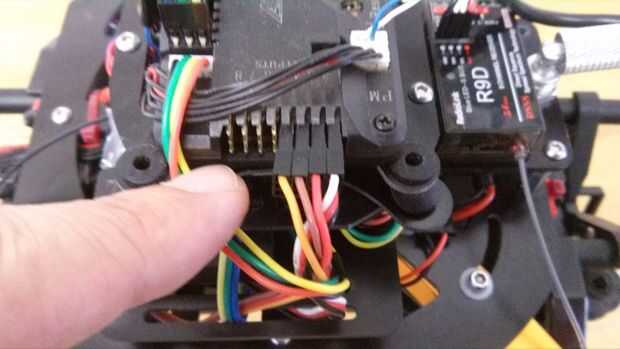
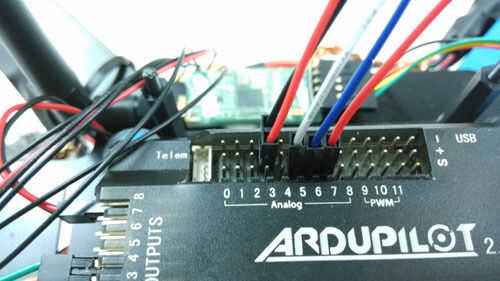
Siguiente paso es conectar el ESC control cables y el receptor de TX/RX a la APM. El CSE tiene cuatro cables para comunicarse con el controlador de vuelo. Uno de ellos es un cable UBEC con tres cables (negro/rojo/blanco), otros tres son solo cables (rojo/marrón/naranja). Necesita conectarse a los puertos de salida APM, como en mis fotos, si ha conectado el motor conduce exactamente como se describe en el paso de instalación de ESC. Asegúrese de seguir los colores y los puertos, es muy importante:
- Salida 1 - cable negro/rojo/blanco
- Salida 2 - cable rojo
- Salida 3 - cable marrón
- Salida 4 - cable naranja
Observar la polaridad del primer cable, pin es siempre el conector central de tierra (negro) es corriente (rojo) y el pasador superior es señal (blanco) de fondo. Cuenta que tengo la versión de pines del lado de APM, también hay una versión de la parte de arriba, donde se muele el pasador exterior (negro), el pin central es corriente (rojo) y el interior es señal (blanco). No mezcle o dañarás tu APM o ESC!!! Los otros 3 cables a un plomo solo y estas siempre en el perno superior (señal).
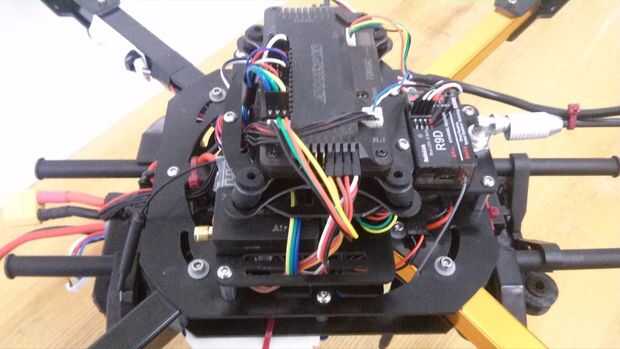
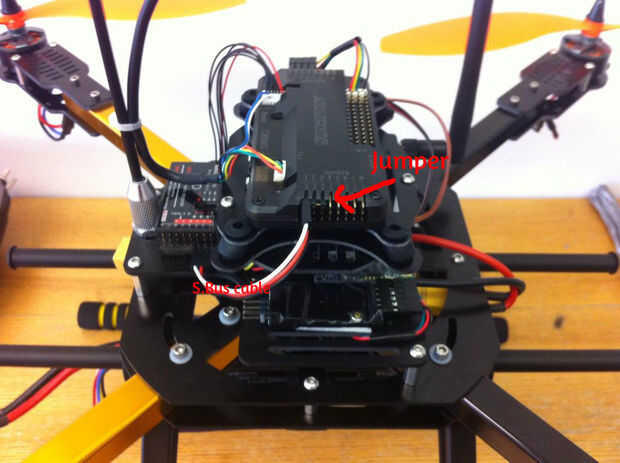
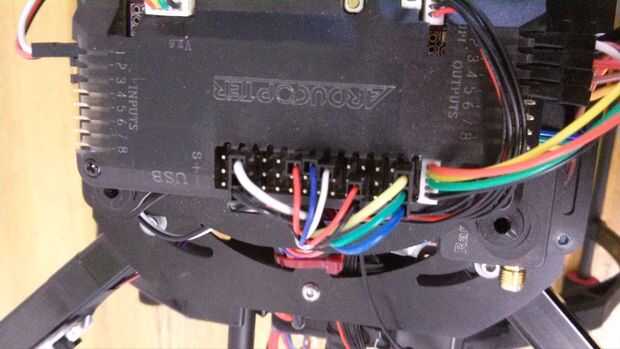
Ahora el receptor. En esta versión yo uso el protocolo de comunicación de Futaba S.Bus entre receptor y APM, wont entrar en detalles, solo sigan mi ejemplo, usted puede encontrar un montón de información sobre ella en la web si lo desea. Necesitamos a un solo cable del servo del 3 pin y un puente común utilizado en la PC. Ponga un extremo del cable del servo en el puerto de S.Bus del receptor y el otro extremo en el puerto de entrada 1 (canal 1) de la APM. Ver la polaridad, servo cables generalmente son color cifrado, así que usa blanco como señal (perno superior en la APM). Se puede ver en el cuadro n º 8. A continuación, inserte el puente común de PC en los pernos superior del canal 2 y 3, básicamente debe cortas la señal pins(top) del segundo y tercer canal en el lado de entrada de la APM. Esto dice el APM para cambiar el protocolo a S.Bus, donde todos los canales son transferidos a través de la línea. Menos cables, menos peso, más espacio y menos errores. Inserte el cable de 4 pines de la OSD de Radiolink PRM-02 en el puerto superior del receptor y se fijan. Más información sobre cómo conectar un receptor a la APM está aquí.
Siguiente guía de la alimentación por cable desde el módulo hasta el APM APM y conéctelo al puerto de alimentación APM, próxima del puerto I2C en el lado de salida de APM. Es el conector de 6 pines, no te equivocarás. Este cable suministra energía regulada al controlador de vuelo y también niveles de información sobre energía, voltajes, corrientes que se pueden ver en el planificador de misión en pantalla en torre o a través de OSD en video feed. Las instrucciones sobre la configuración pueden encontrarse aquí.
Conecte el cable del sonar al puerto A0 de la APM, debe estar marcado, es la primera fila de pin al lado del puerto de telemetría en el APM, una vez más, verifique la polaridad, negro (masa) es en el exterior, rojo (alimentación) está en el centro y señal está en el interior. Debe Sonar en planificador de misión, estos son los pasosde instalación.
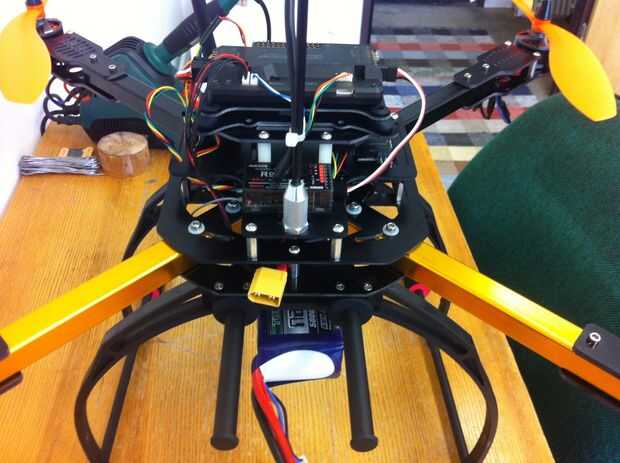
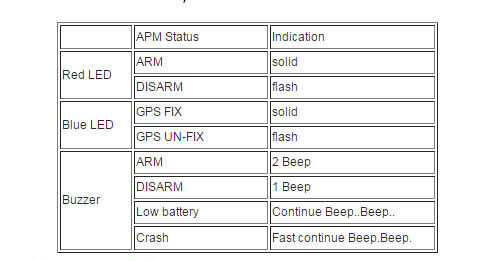
Ahora para el módulo LED y timbre, aseguró en el interior de uno de los brazos traseros, un LEDs el cable a través de las placas a la APM, son 2 conectores, ésos según las instrucciones en los cuadros o en la Página Web de Arducopter conectar. Zumbador
Esto es, casi todos los componentes están instalados, sólo agregamos el cardán en la cámara sin cepillo y después vas a través de algunos pasos de configuración básica en planificador de misión, usted está listo para ir, o volar para ser más exactos :)






")






