Paso 8: Atar el receptor, gas de calibración y ajuste de dirección de giro de motor

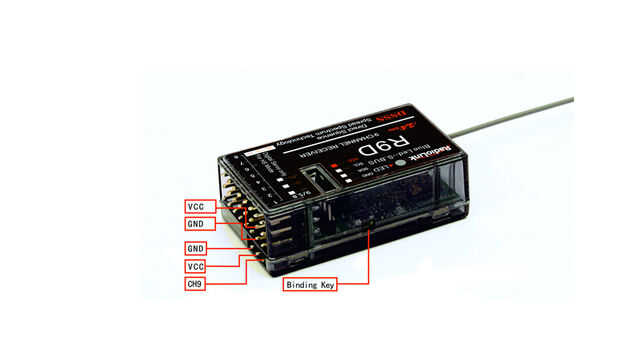
Nuestro combo de radioenlace transmisor/receptor tiene una función de enlace bonito auto. Se describe en el manual pero te digo cómo hacerlo. Sólo necesita hacer esto una vez. Instalar las baterías en el transmisor, conectar la batería de LiPo, eso debe encender su receptor así como el resto de los aviones no tripulados. Ignorar el resto, sólo se centran en el receptor. Coloque el transmisor y el receptor dentro de 1 metro uno del otro. Encienda el transmisor. Hay un pequeño botón (ID) en el lado del receptor, debe presionar durante un segundo y el indicador LED empezará a parpadear. Automáticamente buscar el transmisor más cercano y se unen a él. Emitirá una luz roja sólida y el transmisor mostrará la intensidad de la señal en su pantalla.
Ahora tenemos que cambiar al modo de S.Bus. Pulse brevemente el botón ID Set 2 veces en 1 segundo y la señal debe cambiar de PWM normal a modo S.Bus. El color del LED debe cambiar a un sólido azul/púrpura.
Ahora tenemos que hacer la calibración de la válvula reguladora ESC. Es importante, porque dice la ESC Cuáles son los valores máximos y mínimos de aceleración desde el controlador de vuelo.
- Encienda su transmisor y poner la palanca al máximo
- Con el transmisor palanca todavía alta, desconecte y vuelva a conectar la batería
- El piloto automático está ahora en modo de calibración de la ESC. (En un APM puede notar el rojo y azul LED parpadea alternativamente dentro y fuera como un coche de policía)
- Espere su ESC emitir el tono musical, el número regular de pitidos indicando la cuenta de célula de la batería (3 de 3, 4 para el 4S) y luego otros dos pitidos para indicar que la aceleración máxima ha sido capturado
- Tire la palanca del transmisor a su posición mínima
- La ESC entonces debe emitir un sonido largo indicando que la aceleración mínima ha sido capturado y la calibración se completa
- Si se oye el tono largo indicando la calibración, los CES son "en vivo" ahora y si subes el acelerador un poco que deben girar. Prueba de que los motores giran un poco el acelerador y luego bajar otra vez
- Ajustar el acelerador al mínimo y desconectar la batería para salir del modo de calibración de ESC
Su salida ya está calibrado. Más información aquí.
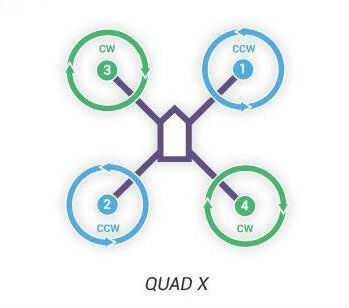
Ahora tenemos que controlar el sentido de giro de cada motor. En un quadcopter diagonalmente opuestas giro de motores en la misma dirección. Ya sea en sentido horario (CW) o antihorario (CCW). Estamos utilizando el llamado configuración Quad-X. Como se puede ver en la imagen, tenemos que los motores de la vuelta en la dirección correcta. Es tan simple como cambiar dos de los tres conductores del motor. Quitar las hélices si los tienes, usted podría conseguir seriamente lastimado con accesorios en. Encender drone conectando la batería, el drone el brazo manteniendo el acelerador hacia abajo y la derecha durante 3 segundos, después suba lentamente el acelerador hasta que los motores empiezan a girar. Si algunos de los pines de motores en dirección equivocada, sólo de su abejón desconectando la batería y la potencia del motor de intercambio dos cables de corriente de. de hecho esto va a cambiar el sentido de giro del motor. Después de haber hecho esto, trate de girar los motores otra vez y asegúrese de que, todos están girando en la dirección correcta. Se realizan ahora. Usted puede leer todo acerca de esto en este artículo. También es la descripción de propulsores, es muy importante que no confunda sus apoyos. Hay dos tipos, pulsadores y tiradores. De lo contrario tu quad moverá de un tirón al instante en despegue. No quieres!!!!!! Siempre es bueno si sus hélices están bien equilibrados antes de primer vuelo, ayuda a hacer el zángano más sensible, estable y elimina las vibraciones indeseables que podrían arruinar tu video. Aquí está mi breve videoclip mostrando una hélice equilibrada buen comportamiento en un balanceador de maglev barato:






")






