Paso 13: Una pinza para muñeca.

A continuación que tenemos que colocar a la pinza a la estructura del robot.
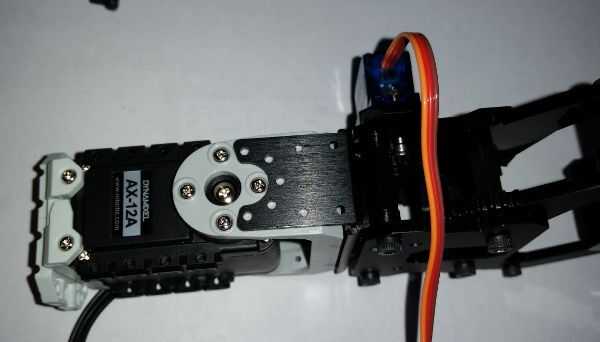
1. primero Conecte un F10 y un piezas de marco F3 Bioloid utilizando cuatro pernos de S2 y cuatro tuercas de N1. Asegúrese de que están acoplado perpendicularmente uno al otro como se muestra en la primera imagen.
2. a continuación coloque cuatro tuercas N1 no ranuras en la parte inferior del servo 5.
3. Amarre la parte F3 a servo 5 utilizando cuatro pernos de S1.
4. Conecte el servo 5 con una tuerca BU y lavadora WA y un perno de S-B en la parte posterior y cuatro pernos de S1 en el cuerno del servo al armazón de muñeca de F2.
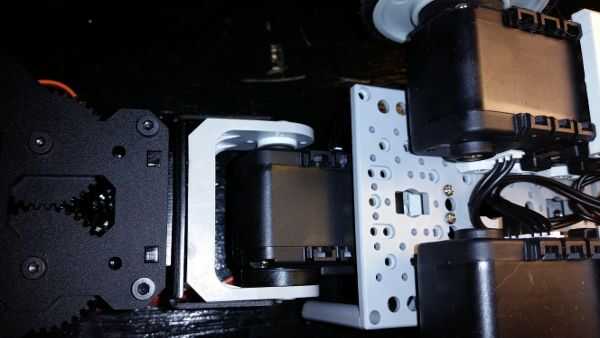
5. Conecte la muñeca entera a la estructura del robot utilizando dos pernos de S3. Atornille los pernos en los zócalos del componente F10 para fijar la muñeca.
6. Conecte un 200 mm cable Dynamixel servo 5.







")





