Paso 19: Conecte los cables a la DynamixShield.
Tenemos que conectar los cables a la DynamixShiled.
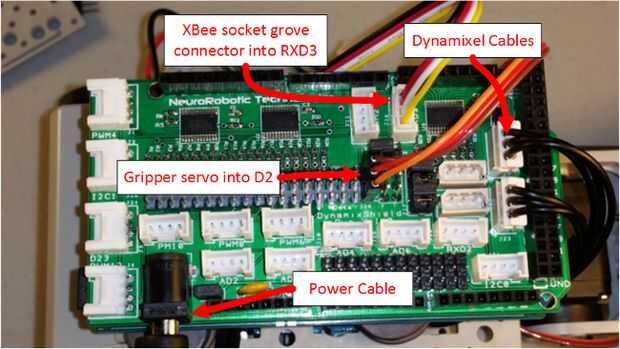
- Conecte los dos cables de Dynamixel en dos de sus ranuras en el DynamixShield. Asegúrese de que tener puentes esos dos puertos para que obtener energía de la Junta Directiva.
- Conecte el servo garra estándar a la ranura de PWM2 en la fila de encabezado digital. Este es el lugar más cercano a la cabecera SPI que es D2. Ver imagen 1 de arriba. Este conector no está polarizado, por lo que asegúrese de insertarlo correctamente con el cable de tierra marrón en la parte superior de la fila de encabezado. También, asegúrese de que el puente J14 que controla el poder de las cabeceras digitales se establece en Vdd y no EXT. El micro servo utiliza alimentación de 5V, pero las Dynamixels en la línea de extensión usan 12V. Si tienes configurado con EXT podría freír su micro servo.
- Conecte la toma de XBee en el conector de grove para serie 3, etiquetado RXD3. El conector de grove está polarizado, por lo que usted no puede insertar incorrectamente.
- Inserte el conector de barril en la ranura de la DynamixShield. Me pareció más fácil si yo dirigiera este cable en el DynamixShield primero. Asegúrese de que tener el puente en su lugar poder Arduino directamente en el poder de DynamixShield.
Eso es todo! Con esas cinco conexiones está listo para controlar el robot. Ahora veamos cómo programar el robot.







")





