Paso 1: Planificación y diseño
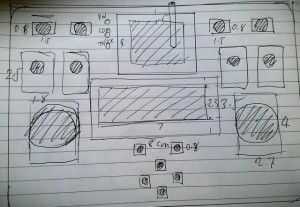
En primer lugar, dibujar el diseño deseado sobre el papel. Hacer usre medir cada componente y dejar suficiente espacio entre ellos. También asegúrese de que no estén demasiado cerca para afectar la experiencia del usuario.
Que componentes utilizar depende en gran medida qué tipo de proyecto o robot intenta control. Por ejemplo para un tanque robótico simple, puede ser capaz de hacer ir hacia adelante y hacia atrás, girar a la izquierda y derecha. Así que cuatro botones sería suficiente para lograrlo.
Para mi mando a distancia, yo soy no diseño estrecho para algunos proyectos específicos, pero de uso más general. Por lo tanto, utilicé una combinación de diferentes tipos de componentes de control.
Aquí están las piezas que utilicé:
- Interruptor x 4
- Joystick de 2 ejes x 2
- Potentio metro x 4
- Pulsador x 6
- LED x 3
- LCD x 1
- Arduino Mega x 1
- Cables x muchos
- Pequeña placa x 2
- Ciesco XRF módulos inalámbricos x 2
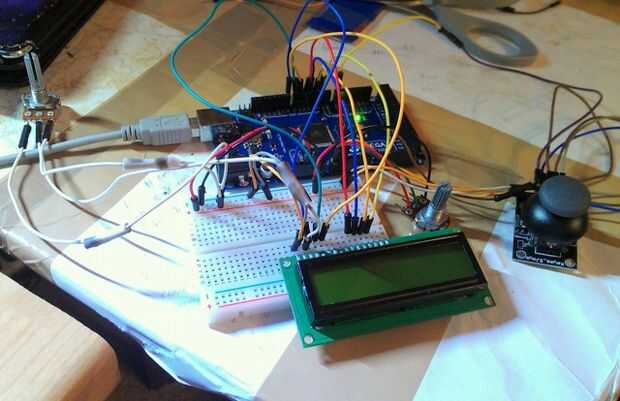
Después de eso, conectar el componente en un protoboard y prueba de ellos.
 - neurálgico Fablab")












