Paso 11: Casi listo!
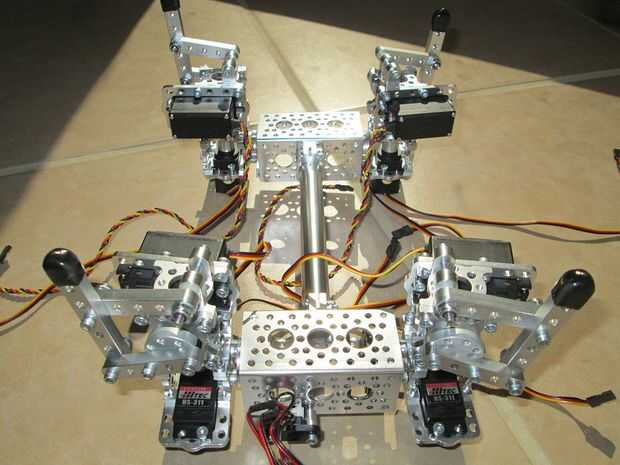
Ahora arreglar el Canal frontal, Canal trasero, tubo de 5/8"y 4 módulos completos del movimiento de piernas como se muestra en la foto. Manteniendo intactas las posiciones relativas, inserte el 90 ° cuádruple eje montaje B de cada Módulo completo de movimiento de la pierna en el extremo del canal y fíjelo con 4 x 6-32 tornillos de cabeza hueca.
Ahora manteniendo el Canal frontal y Posterior del canal boca abajo sobre la superficie de trabajo plana, junto con el adjunto Módulos completos del movimiento de la pierna, Inserte el tubo de 5/8" en una de las abrazaderas de tubería y apriete el tornillo de cabeza hueca 6-32.
Inserte el otro extremo de la tubería en la abrazadera de tubo 2 y apriete.
Usted puede ahora voltear el robot por lo que está sentado sobre sus 4 patas!











![[DIY] Araña Robot (robot de Quad, cuadrúpedo)](https://foto.askix.com/thumb/170x110/c/ee/ceede9295111d43b4a1ba30223f7f41c.jpg "[DIY] Araña Robot (robot de Quad, cuadrúpedo)")

