El problema principal con la construcción de robots de verdad pequeños es el tamaño relativamente grande de incluso los más pequeños motores y baterías. Ocupan la mayor parte del volumen de un micro robot. Estoy experimentando con maneras de eventualmente hacer robots que son verdaderamente microscópicos. Como un paso intermedio, hice los tres robots diminutos y el controlador que se describe en este instructable. Creo que con modificaciones, estas prueba de robots de concepto, podría ser reducido a tamaño microscópico.
Después de años de la construcción de pequeños robots (ver aquí:), decidió la única manera de hacer posible los robots más pequeños, era que los motores, baterías e incluso el microcontrolador Picaxe externo al robot.
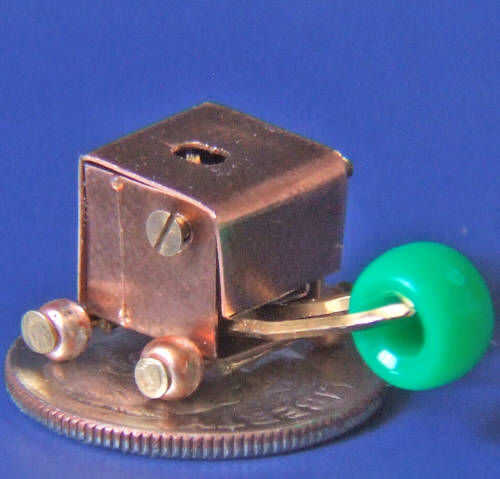
muestra PIC 1 R-20 un robot de 1/20 pulgada cúbica de una moneda de diez centavos.
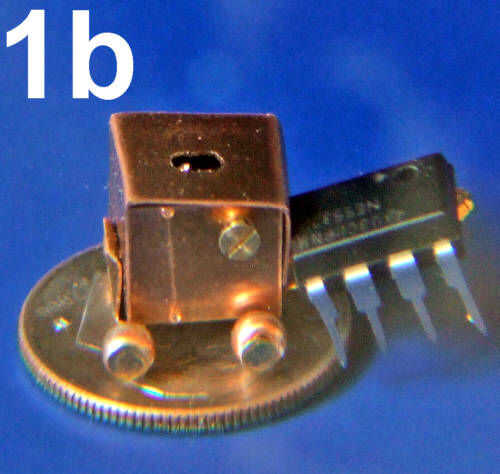
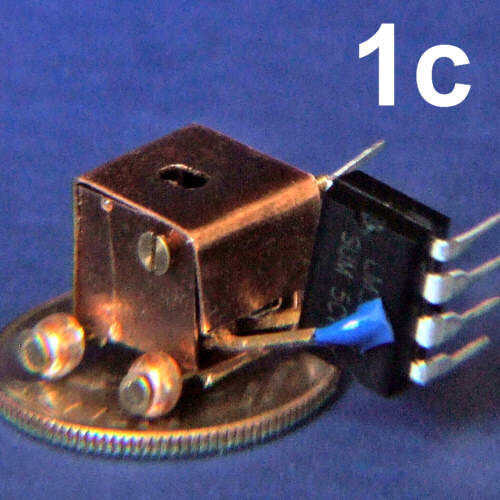
Foto 1b y 1C muestran más pequeño robot con ruedas levantando y sosteniendo un IC de 8 pines.
ALLÍ es un VIDEO en el paso 3 que muestra el robot recogiendo un IC de 8 pines y moverlo.
Y otro video en el paso 5 que muestra el robot en una moneda de diez centavos.


")



 ¿")






